中英文核心期刊咨询网
首页
期刊分类
教育期刊
医学期刊
农业期刊
电子期刊
科技期刊
经济期刊
建筑期刊
常见问题
SCI论文
SSCI论文
EI源刊会议
SCOPUS
国内出书
国外出书
联系我们
>
当前位置:
首页
>>电子论文
电子论文
3D 打印技术在我国食品加工中的发展前景和建议
摘 要: 目前我国食品加工业正处于高速发展时期,在科技创新发展战略的驱动下,传统食品加工技术必然迎来革命性的变革。3D 打印技术是一种以数字模型文件为基础构造物体的新技术,概述了 3D 打印技术在我国食品加工应用中的发展前景,并提出了目前存在的问题和挑战。建
基于滑模观测器与滑模控制器的永磁同步电机无位置传感器控制
摘要 针对无位置传感器永磁同步电机控制系统中转子位置与转速无法直接测量的问题,提出基于滑模观测器的转子位置间接检测方法。通过研究低速时滑模观测器的估算误差较大的特点,分析无位置传感器控制方式下电机存在无法零速起动的问题,利用变压变频控制策略进行他控起
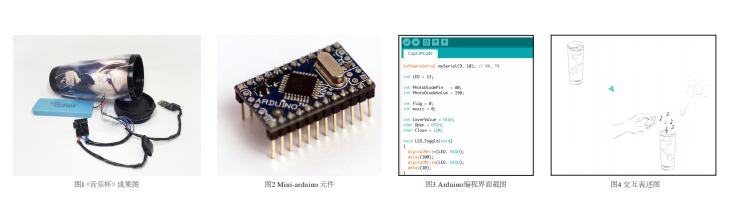
基于光敏感应技术的新媒体交互艺术设计研究
摘要:探索光敏感应技术与新媒体交互艺术结合的可能性。对目前感应技术和实际应用案例进行分析,了解使用原理,同时研究新媒体交互艺术的概念和起源,了解其设计理念和含义,结合光敏感应技术和新媒体交互艺术进行设计研究。创作出新媒体交互艺术装置《音乐杯》。利用
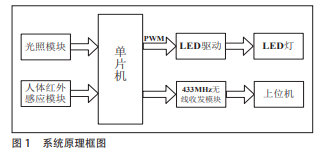
基于多传感器信息融合的智能照明系统设计
摘要:针对传统照明系统电能利用率低、调光性能差、不能集中控制等不足,提出了基于多传感器信息融合的LED智能照明系统,探讨了系统的基本原理和实现方法,并给出系统的硬软件设计方案。人体红外传感器和光敏传感器所采集的信息,经过单片机的融合,利用先进的PWM调光
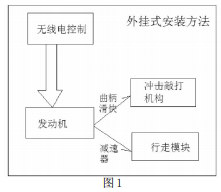
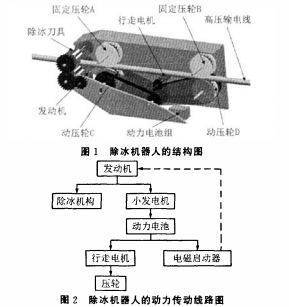
架空高压输电线除冰机器人设计
摘 要北方输电线路冬季因受冰雪危害引起的供电中断事故严重,修复工作难度大、周期长、停电面积广,是全世界范围内需解决的难点问题。针对此问题本文设计一台沿架空高压输电线自动前行的机器人,该机器人采用机械除冰方式,利用冲击头沿轴线高速敲击高压线上的附冰,使
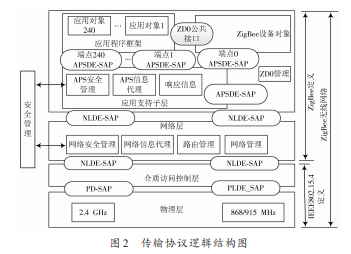
基于ZigBee无线传感器网络的智能照明系统设计与实现
摘 要:针对当前的照明系统存在智能化程度低、调节能力差的问题,导致能耗较高,提出一种基于 ZigBee无线传感网络的智能照明系统设计方法,根据外面环境中的亮度、能见度、污染物浓度等参数构造智能化控制模型,以照明系统的输出功率为约束条件,引入占空比控制算法,
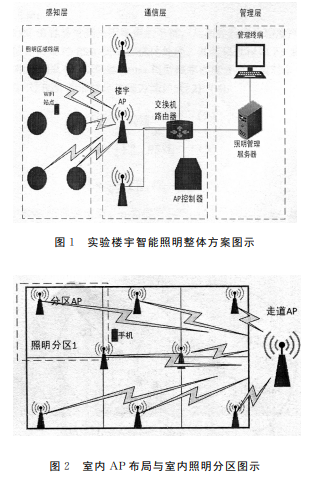
基于WIFI定位高校实验楼宇的智能照明优化设计
摘 要:利用 WiFi技术设计了一种实验楼宇智能照明控制系统。通过 AP站点对 WiFi站点进行测距,单片机通过通信层将测距结果传送给管理层中照明管理服务器进行实时定位处理,并下发控制命令,实现对实验楼宇中的照明设备进行智能远程控制。文章对智能照明系统的整体方案
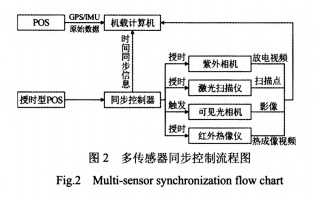
基于无人机多传感器数据采集的电力线路安全巡检及智能诊断
摘要:为满足电力线路应急处置和安全巡检业务的高效、自动化处理需求,设计研发了一套无人直升机多传感器电力线路安全巡检系统。首先,通过高精度同步授时与标定,统一机载紫外、红外、可见光以及激光传感器的时间、空间基准。其次,无人机通过机载多传感器同步采集输
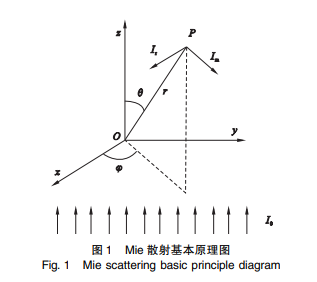
基于光散射法和电荷感应法融合的粉尘浓度检测技术
摘 要: 为了减小粉尘浓度在线检测误差,分析光散射法和电荷感应法的基本原理,揭示两种方法的局限性;将光散射子单元和电荷感应子单元的结构和数据融合,研制并联自动切换的融合单元,提出一种粉尘浓度融合检测算法. 实验发现:融合单元的检测误差11. 3% ,比光散射子单元小 3
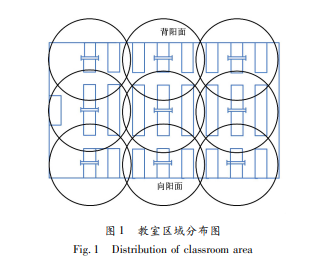
基于STM32的智能照明监控系统的设计与实现
摘 要: 针对高校教室照明方式存在能源浪费、室内光强不足或过剩及管理落后等现象,设计了基于 STM32 的高校教室智能照明监控系统。系统以 STM32F103-VET6 控制器为核心,以 LED 灯为控制对象,由红外模块、光检模块和 ZigBee 无线通信模块等组成。采用分区域控制方式,
高压输电线上除冰机器人的系统设计
摘要:针对我国南方地区雪灾中输电线路的破坏情况,提出并设计了一种新型高压输电线除冰机器人,并在机器人的结构设计、行走规划、除冰方式和控制系统等方面做了较详细的设计说明。该机器人具有结构简单、行走稳定、除冰效率高和能耗小等优点。能够较好地完成高压输电
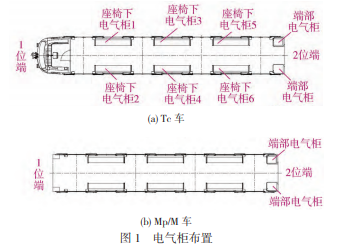
标准地铁列车电气柜布置策略及走线方案研究
摘 要:为了满足全自动无人驾驶列车的设计需求,文章提出分散式电气柜统筹布置方案,并以标准地铁列车为例,介绍了电气柜的结构及布置方案,对其柜体内外走线路径进行了设计和分析。通过试验验证,证明该方案能满足标准地铁列车的设计要求,可有效提升整车空间利用率和
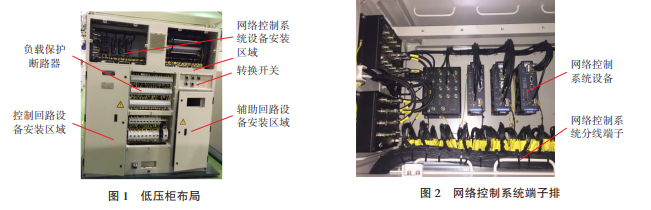
电力机车低压电气柜接线端子排设计
摘 要:为使低压电气柜布线线路规整、接线美观、维护方便,以电力机车低压电气柜为例,介绍低压电气柜设备和线路布局,详细论述低压电气柜网络控制系统、控制回路和辅助回路接线端子排的设计思路、选型方法,以及在低压电气柜内部的布局和注意事项。在设计低压电气柜时
电荷感应监测技术在矿山动力灾害中的应用
摘 要:针对矿山动力灾害前兆信息难以识别、提取及预测准确率较低的现状,提出采用非接触式电荷感应监测技术来预测矿山动力灾害,应用自主研制的电荷感应系统对煤岩体在单轴压缩、单轴拉伸、三轴含瓦斯压缩等加载方式下进行了电荷感应测试,同时根据试验数据探究了煤岩
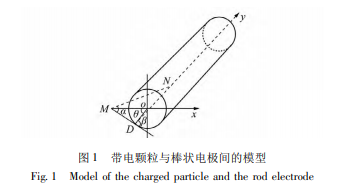
电荷感应法粉尘浓度检测技术
摘 要: 为了避免目前粉尘浓度传感器管路易堵塞、维护较频繁的问题,根据煤矿粉尘的电荷性提出电荷感应法粉尘浓度检测技术。建立了棒状电极与粉尘颗粒间的电荷感应数学模型,推导了棒状电极电荷感应空间灵敏度,并分析了其感应空间灵敏度的分布特性; 通过对单一粉尘颗粒
促进剂对电气柜用冷轧板常温锌-锰系磷化膜耐蚀性的影响
摘要:通过添加亚硝酸钠或硝酸镥作为单一促进剂或两者复配制备复合促进剂对常温锌-锰系磷化液加以改进,并使用改进的磷化液在不同温度下进行实验。比较了使用单一或复合促进剂获得的磷化膜的形貌质量和耐蚀性,同时研究了温度对使用复合促进剂获得的磷化膜的形貌质量和
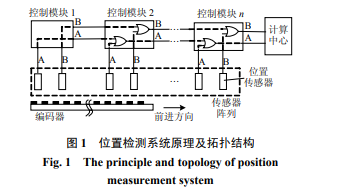
电磁发射用直线感应电机位置检测系统关键技术研究
摘要:电磁发射用直线感应电机采用基于传感器阵列的位置检测系统。该系统以电感式接近开关作为位置传感器并构成传感器阵列,通过电涡流效应感应动子运动并生成相应位置信号。利用位置算法对位置信号进行计算可以实时准确地得到动子位置。设计了位置检测系统的基本原理
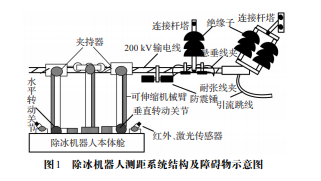
除冰机器人的多传感器融合障碍测距方法研究
摘 要:障碍物测距是高压输电线路自主除冰机器人的关键技术之一。针对220 kV输电线路除冰机器人的结构特点,提出了一种基于扩展卡尔曼滤波的障碍物距离信息融合检测方法。首先根据障碍物分布情况设计了除冰机器人多传感器检测系统的结构,建立了障碍物信息融合系统模型
冲击地压预测的电荷感应技术及其应用
摘要:利用建立的煤岩电荷感应试验系统,研究煤岩变形破裂过程的电荷感应规律;利用研制的电荷感应仪对矿井进行现场测试。试验研究表明,煤岩在变形破裂过程中有电荷感应信号产生,煤岩体中应力越高,变形破裂过程越强烈,产生的电荷感应信号越强;在临近峰值应力前电荷
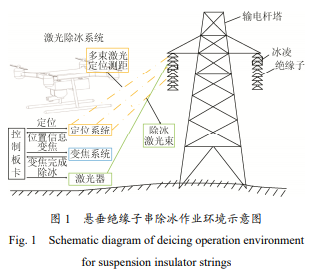
超高压输电线悬垂绝缘子串激光除冰机器人构型设计研究
摘 要:绝缘子是超高压输电线路上的重要装备,由于长期服役于高空、高压恶劣作业环境,以及冬季极端低温环境下会造成的绝缘子串覆冰不仅增大了绝缘子串的重量,而且还会影响绝缘子的电气绝缘性能,特别是绝缘子串上片与片之间所形成的冰凌会直接导致绝缘子片间短路,因
6
7
8
9
10
学术咨询服务正当时
学术咨询
回到顶部






 >
>