
 >
>除冰机器人的多传感器融合障碍测距方法研究
时间:
摘 要:障碍物测距是高压输电线路自主除冰机器人的关键技术之一。针对220 kV输电线路除冰机器人的结构特点,提出了一种基于扩展卡尔曼滤波的障碍物距离信息融合检测方法。首先根据障碍物分布情况设计了除冰机器人多传感器检测系统的结构,建立了障碍物信息融合系统模型。然后根据障碍物信息状态模型的非线性特点,对传感器获取的异步测量数据进行同步处理,再应用改进的扩展卡尔曼滤波对多传感器信息进行滤波和融合,并与单个传感器的结果相比较,实验结果研究表明:该方法能有效地融合不同传感器的信息,具有更高的测距精度和更快的收敛速度。
关键词:除冰机器人;障碍物测距;信息融合;扩展卡尔曼滤波
1 前言
我国是输电线路覆冰最为严重的国家之一,覆冰导致的电力事故给工农业生产和人们生活造成严重影响。2008 年年初的罕见大面积冰雪灾害给我国带来了巨大的经济损失,线路大量结冰造成电网的损害尤其严重。因此研究输电线路在线除冰机器人替代低效率的人工除冰,对于保护我国电网的安全运行和电力工人的生命安全具有及其迫切的现实意义。
障碍物距离信息检测是自主除冰机器人的关键技术之一,也是保障除冰机器人能在除冰前进过程中安全、无碰撞地避开所有防震锤、悬垂线夹、耐张线夹等杆塔支撑附件形成的主要障碍和实现自主越障。机器人的多传感器信息融合技术[1] 对于降低误差、提高测距精度有着十分重要的作用。目前常用的数据融合方法[2] 有加权平均法、卡尔曼滤波法、贝叶斯估计法、小波变换法、D-S证据推理、专家系统、神经网络等。目前,基于卡尔曼滤波算法的障碍物信息融合方法在机器人避障系统上已得到了较多应用,文献[3]介绍了一种汽车防碰撞系统的多传感器卡尔曼滤波距离融合算法,实现了汽车避障和防碰撞。文献[4]在移动机器人导航系统中运用扩展卡尔曼滤波对距离和方向信息进行融合,实现了机器人的导航避障。但是以上卡尔曼滤波融合方法计算量大,融合精度和效果不很理想。
根据220 kV输电线路的结构和障碍物状态模型的非线性特点,设计了一种新型的基于扩展卡尔曼滤波的除冰机器人障碍物信息融合方法。选择了红外传感器和激光传感器[5] 建立障碍物信息检测系统,具有融合精度高和收敛速度快的优点,可有效地应用于除冰机器人的障碍物信息检测和自主避障、越障。
2 除冰机器人多传感器系统模型
2.1 除冰机器人测距系统及障碍物分布
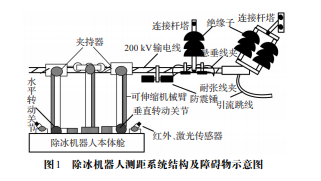
除冰机器人多传感器测距系统结构及220 kV输电线路的主要障碍物分布如图1。
为了保障在恶劣冰雪环境下稳定可靠的越障,除冰机器人总体设计为可伸缩式的三臂结构,并有水平和垂直转动关节,除冰机构和抱死机构以保证除冰和防滑。本体舱内有动力箱和控制箱。
机器人常用的测距传感器有红外传感器、激光传感器、超声波传感器和 CCD 传感器等。其中激光传感器的无接触远距离测量、速度快、精度高、抗干扰能力强等优点,非常适合除冰机器人工作的高压、恶劣天气等复杂环境。而红外传感器精度高、方向性强、对目标的环境依赖性小等优点,特别是方位信息误差较大时有明显的优势。因此本文设计两组红外传感器和激光传感器,分别安装在本体舱的前后两端(如图 1)。检测线路上主要障碍物的距离状态信息,并结合改进的扩展卡尔曼滤波融合算法,实现不同传感器的优势互补和提高检测的精度。
2.2 多传感器障碍物信息融合模型
设计的信息融合模型(如图2)主要包括多传感器障碍(距离、角度等)数据获取、数据关联处理、数据级融合(特征提取、 EKF融合计算)和结果输出等环节。
3 除冰机器人多传感器障碍检测模型
文献[6-7]应用了多传感器信息融合的物体位姿检测方法并建立了系统状态方程,以前端的两个传感器为示例建立三维坐标系,检测系统模型结构图 3 所示,考虑干扰和噪声误差,激光传感器LA和红外传感器IR分别检测获得障碍物的斜距 RLA 和 RIR 、方位角 θLA 和 θIR 、高度角 βLA 和 βIR 的异步数据,即到达时间与融合时间不同步。
设两传感器与障碍物的初始斜距均为 R0 ,初始距离方位角均为 θ0 ,初始高度角均为 β0 。则由图3可得测量系统的初始状态方程 So[x0 ?y0 ?z0] 。设各方向上的匀速运行速度为 vx 、 vy 和 vz ,传感器的测量周期分别为 TLA 和 TIR ,起始数据的延时为 tLA0 和 tIR0 ,除冰机器人前进轨迹看作直线运动。 t = T + t0为匀速运行时间,于是两传感器相对于障碍物的系统状态分别为:
4.2 障碍物信息异步数据的同步处理
4.2.1 融合时间差同步处理
由于各传感器的采样周期 TLA 和 TIR 互不相同,加上测量噪声误差和延时,所以距离和角度测量值均为异步数据,其到达时间与融合时间不同步。文献[8]对传感器异步数据进行了同步时间过滤算法,本文通过滤除延时干扰,可以明显地降低误差,获得同步数据后送入融合单元。
5 数据融合实验仿真结果
为验证本文方法的有效性,给定障碍物的斜距初值为 R0LA = R0IR = 12 000 mm ,方位角初值为 θ0LA = θ0IR = π/6 ,高度角初值为 β0LA = β0IR = π/18 及采样周期和延时等等,各初始参数均是经过多次实验而得到。设计除冰机器人在输电线路上破冰匀速直线前进的速度为 1 m/ min 。障碍物距离数据融合误差设定为 0.002 5,障碍物方位角和高度角数据融合误差均设定为0.003。
对两种传感器数据滤波融合的结果与单独传感器分别的滤波结果对进行比较,障碍物的斜距距离、方位角和高度角的融合对比结果分别如图4~图6所示。
由图 4 可知,对于障碍物距离 R,扩展卡尔曼滤波融合的结果比激光传感器、红外传感器单独滤波时具有更高的精度和更优的收敛速度,误差均方根收敛于零。同样,由图 5和图 6可知,障碍物的方位角 θ 和高度角 β 的融合也获得了非常好的精度和收敛速度,其误差均方根也都收敛于零。
实验结果表明,多传感器融合方法明显优于单个传感器滤波的估计结果,可保证障碍物信息的准确估计。为除冰机器人避障、越障和顺利除冰提供了有效的支持。
6 结论
设计了输电线路除冰机器人障碍物距离、方位角、高度角等信息的多传感器检测系统,并提出了一种符合障碍信息状态模型非线性特点的改进扩展卡尔曼滤波融合新方法,对卡尔曼滤波的状态估计误差协方差和观测模型矩阵等进行更新,因此提高了滤波的融合精度,获得了多传感器障物信息的最优估计。实验结果表明,本文方法能有效地融合被测障碍物信息,具有更高的精度和更快的收敛速度,帮助除冰机器人获得最优的障碍物信息。——论文作者:向阳琴,孙 炜,王 聪
参考文献:
[1] 龚元明,萧德云,王俊杰.多传感器数据融合技术(上)[J].金自动化,2002(4):4-7.
[2] 华鑫鹏,张辉宜,张岚.多传感器数据融合技术及其研究进展[J].中国仪器仪表,2008(5):40-43.
[3] 党宏社,韩崇昭,段战胜.基于多卡尔曼滤波器的自适应传感器融合[J].系统工程与电子技术,2004,26(3):311-313.
[4] 孔凡天,陈幼平,谢经明,等.基于多传感器信息融合的移动机器人导航系统[J].计算机工程与应用,2005,41(32):22-25.
[5] 金峰,蔡鹤皋.机器人 MU 与激光扫描测距传感器数据融合[J].机器人,2000,22(6):470-473.
[6] 丁希仑,解玉文,战强.基于多传感器信息融合的物体位姿检测方法[J].航空学报,2002,23(5):483-486.
[7] Yang Qing-mei,Sun Jian-min.A data fusion method applied in an autonomous robot[C]//Proceedings of the 27th Chinese Control Conference,Kunming,2008:361-364.
[8] 孙纪敏,沈玉龙.传感器网络异常时间同步数据过滤算法[J].西安电子科技大学学报:自然科学版,2008,35(5):910-915.
[9] 郑富强,付建国,洪俊.分布式雷达目标位置数据融合算法[J].中国雷达,2008(3):48-52.
[10] 陈莹,韩崇昭.基于扩展卡尔曼滤波的车道融合跟踪[J].公路交通科技,2004(12):114-117.
[11] 彭刚,黄心汉.基于视觉引导和超声测距的运动目标跟踪和抓取[J].高技术通讯,2002(6):74-79.
[12] Chang Hong,Feng Zu-ren.A method of data fusion based on the robust minimum variance filtering[C]//2007 IEEE International Conference on Control and Automation,Guangzhou,2007: 1760-1764.
[13] Kim J,Kim Y,Kim S.An accurate localization for mobile robot using extended kalman filter and sensor fusion[C]//2008 International Joint Conference on Neural Networks,2008:2928-2933.
[14] Canan S,Akkaya R,Ergintav S.Extended Kalman filter sensor fusion and application to mobile robot[C]//Proceedings of the IEEE 12th Signal Processing and Communications Applications Conference,2004:771-774
