
 >
>架空高压输电线除冰机器人设计
时间:
摘 要北方输电线路冬季因受冰雪危害引起的供电中断事故严重,修复工作难度大、周期长、停电面积广,是全世界范围内需解决的难点问题。针对此问题本文设计一台沿架空高压输电线自动前行的机器人,该机器人采用机械除冰方式,利用冲击头沿轴线高速敲击高压线上的附冰,使附冰以块状的形式脱落。同时该机器人可通过更换打击头以适应不同直径规格的高压输电线。机器人的行走采用三个带槽轮子,紧夹高压线缆,以确保机器人在除冰过程平稳前行。该机器采用单缸二冲程发动机,功率适合,续航能力强。本文还介绍避免因发动机的震动引起高压输电线共振舞动的方法。同时,机器人可以携带检测和通信设备,对输电线路进行巡查作业。
关键词架空输电线路;覆冰;除冰机器人;除冰;消除共振
引言
输电线路冬季因受冰雪危害引起的供电中断事故通常都是较严重的,其修复难度大、周期长、停电面积广、影响铁路交通。因此,一直是全世界范围内需要解决的难点问题。2008 年初,我国南方大面积连续降雪,使输电线路附冰,导致杆塔倾斜倒塌、断线及绝缘子闪落,以及因不均匀覆冰和不同期脱冰引起输电线舞动现象,造成输电线塔架倒塌。目前已研制的一些机器人,用以高压线除冰,但大多功率太低、续航时间短。因此现在主要依靠人力除冰,通过电力工人爬上高压线塔用铁锤、拉杆、竹棒沿线敲打使覆冰脱落,这种方法不仅效率低而且对电力工人的生命安全造成了极大的威胁。因此,研制新型高效的除冰器来代替人工变得十分迫切。利用架空高压线除冰器代替人工除冰是目前发展趋势,而且机械除冰法具有效率高、成本低、保障人身安全等优点。研制新的机械除冰机器代替人工进行输电线除冰具有较好的应用前景和实用意义。
1.除冰器的整体方案
目前国内和国外的除冰技术可归纳有 3 0 余种,总体可分为:热力融冰法、机械破冰法、自然被动法、其他方法。
热力融冰法:利用电流电阻焦耳效应发热融化线上的覆冰,这种方法把冰融化,消耗同样的能量,所能除的覆冰较少,效率较低。
自然被动法:依靠风、地球引力、随机散射和温度变化等脱冰的被动方法。该方法无需附加能量,但随机性较大,不能保证可靠除冰。
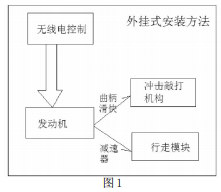
借鉴国内外的除冰机器人方案,本文设计了一种除冰效率较高的除冰机器人。本机器人已制作出实物,通过实验可以清除不同厚度及形状的覆冰。机器人采用单缸二冲程发动机经一级减速后带动一曲柄滑块机构,滑块沿轴线方向高速往复滑动,冲击头与滑块固接,带动冲击头沿轴线方向以 15Hz 的频率敲打覆冰。同时,发动机的另一输出通过205:1 的减速后,驱动主动轮带动整个机器人沿输电线行走。发动机的油门大小通过二通道无线电伺服电机控制,同时机器人上携带一些巡线检测设备以供检查输电线路电缆是否损坏,是否是有异物附其上,及观察到高压电缆线下的状态是否正常。模块图如图 1 所示。
机器人自重小于等于30Kg;发动机排量39cc;机器人前行速度10cm/s;导线直径 12mm。
2.机器人行走模块
资料显示,国内外高压线巡线机器人的行走基本采用两种方式:步进蠕动式和轮式滚行式。步进蠕动式行走速度较慢,线缆与夹紧块比较,直径较小,步行方式的稳定性较高,且具有跨越障碍的功能;轮式滚行方式速度快,但不平稳。本文设计的机器人行走装置将两者的优点结合。三个带槽的轮子紧紧地将输电线缆夹紧,既能达到所需行走速度又能保证行走的平稳性。行走模块的具体装置如图2 所示。该行走模块包括链轮链条、带槽主动轮、轴、丝杆夹紧装置。主动轮和从动轮通过轴与机架相连,位于输电线缆的上方;从动轮与丝杆夹紧装置相连,丝杆与机架相固接,位于输电线下方,调整丝杆就可以调整从动轮与主动轮夹紧输电线缆的力的大小。整个机器采用外挂式靠轮子挂在输电线上面,装拆方便。发动机经减速之后通过链轮链条传动带动主动轮旋转前行。为了增加除冰器在输电线缆上工作的稳定性,设计将机器的大部分重量放置在高压线的下方,因为低重心可避免机器侧翻。设计在行走的带槽轮子内侧附着相对摩擦系数较大的橡胶材料以防止轮子与输电线缆之间的打滑。
3.除冰模块的设计
结合已有的除冰方法,本文提出一种更加节能的机械除冰方式,其最大的创新点在于使覆冰以较大体积的块状方式脱落,较热力除冰节约大量的能量,是真正的高效节能除冰。
充分利用冰硬而脆的物理特性,本文设计的机器人采用特制冲击头固接于曲柄滑块机构的滑块上,以15Hz 的频率反复敲击覆冰。冲击头360°环形包围着输电线缆且留有间隙保证了除冰干净彻底,同时又避免在除冰过程中损坏电缆。此外,冲击头设计为剖分式,安装方便。冲击头与覆冰之间的撞击产生的后坐力通过主动轮与从动轮之间的夹紧产生的摩擦力来平衡。冲击头来回敲击覆冰,使覆冰以块状的形式脱落,该除冰方式具有以下优点:(1)可以用于不同厚度形状的覆冰(2)只要冲击头通过的输电线缆就能保证除冰的彻底性(3)覆冰块状形式脱落,大大降低了能耗(4)能在除冰时保护输电线缆不被破坏。由于覆冰在低温下具有粘性,冲击头破冰后,可能在输电线上粘有一层薄冰层,可通过主动轮和从动轮的碾压破除,从而除冰更加彻底。
冲击头通过刚性杆与滑块相连,如图3 和图4 所示,滑块又称为连接头。
4.发动机引起输电线舞动的解决方法
自然条件下,输电线可能会由于风、雨等因素引起舞动,若舞动的幅度大,会造成输电线塔的破坏,甚至倒塌。若有一振动源位于输电线上,其共振的频率和输电线的固有频率相近,则会引起输电线的共振,对输电线塔造成破坏。
相关知识推荐:机械电子论文公开发表多少钱http://www.lunwencheng.com/a/changjianwenti/17838.html
本文介绍的除冰器采用单缸二冲程发动机,正常工作转速为 3000r/min,则气缸中活塞的振动频率为 50Hz,把输电线缆简化成两端固定的弦,计算其固有频率为 20Hz ,气缸中活塞振动频率与之相差较大,引起振动幅值小。为了更彻底减小振幅,将发动机的活塞振动方向放置成与输电线轴线平行的方向,并且在机架与发动机连接部位加减震缓冲材料。这种方法可以大幅度降低发动机震动引起输电线舞动的可能性,确保机器人工作稳定可靠。
5.机器人控制模块和检测模块
考虑到输电线的地域特点,除冰机器人采用二通道无线电遥控控制。其中一个通道控制舵机来控制油门的大小,另外一个通道控制发动机的启动电机。油门的大小根据线上覆冰的情况来调节,若冰厚实,则可加大油门。若在除冰过程中,遇到突发事故— —发动机熄火,则可通过遥控控制启动电机,进行远程启动,继续除冰。本文介绍特殊的控制方式使除冰机器人轻便灵活,适应性强。
同时在机器人上载有 CCD 摄像头,用以采集工作情况时输电线的状态,远程发回控制者的接收装置,为下一步的数据分析提供必要保证,也方便于控制者对除冰机器人的准确控制。本机器人还可以携带特定检测模块,目前,设计载有探伤仪探测钢芯铝绞导线或钢绞地线的内外损伤。同时有红外热感像仪等。
6.除冰机器人的三维模型与实物制作
按照上述的各个结构模块,应用 SolidWorks软件绘制除冰器的三维模型图。对其进行motion 分析,分析结果与计算结果有较小误差。最后时段设计的机器人在实验室按 1:1 制作,进行试验。
实验结果表明,轮式行走往复敲击式高压线除冰机器人较好地实现设计需求,同时在消除输电线舞动方面效果更佳。
随着输电线路电压等级越来越高,杆塔设计高度也越来越高,线路导线覆冰现象也越来越严重,因此对输电线路的防冰和除冰方法的研究也显得格外重要。
本文介绍来的高压线缆除冰机器人是一个机电系统,在满足机械动作和机械强度前提下,采取多种措施使系统的结构紧凑;针对不同厚度的覆冰的除冰要求,且有高效节能的特点。本除冰机器人还可以将除冰模块拆下,变为寻仙机器人,获得一机两用的效果。同时更换所携带的检测装备,以达到不同的检测目的。值得高兴的是本文介绍的机器人已获得全国大学生机械设计大赛四川省二等奖。
相信随着人们对导线覆冰现象研究的逐渐深入和机器人运用技术的逐渐成熟,高压线缆除冰机器人将有更好的发展及应用前景。——论文作者:李海 张吉 杨汝舟 唐磊
参考文献
[1] 朱兴龙,王洪光,房立金,等. 一种自主越障巡检机器人行走夹持机构[J]. 机械设计.2003,23(8):11-14.
[2]山霞舒,乃秋.关于架空输电线除冰措施的研究[J].高电压技术. 2006,32(4):25-27.
[3] 杨暘,高虹亮,孟遂民,罗成,马小强.架空输电线除冰机器人的结构设计[j].电力建设.2009,30(3): 93-96
[4]吴功平,戴锦春,郭应龙,等.具有自动越障功能的高压线巡线小车[J].水利电力机械.1999(2):46-50.
