
 >
>超高速碰撞碎片云质量分布快速预测技术
时间:
摘要:在航天器防护构型设计中,快速预测空间碎片超高速碰撞防护屏产生碎片云的质量分布及其变化规律具有重要作用。本文初步探索了采用深度学习方法预测超高速碰撞碎片云的二维质量分布及其变化过程。训练数据来自约 2000 个弹丸(铝球)超高速正碰撞靶板(铝板)的光滑粒子流体动力学数值模拟结果,共考虑 4 个变量(弹丸速度范围 3~8 km/s、弹丸半径范围 2~8 mm、靶板厚度范围 1~4 mm 以及观测时间范围 1~12 µs)。系统比较了反卷积模型和多层感知机两种模型的预测效果,重点考察了模型的外推能力(应用于训练参数范围之外)。研究结果表明:在训练参数范围内两种模型的预测精度都很高;反卷积模型能够捕捉到碎片云质量分布的颗粒特征,但外推能力较差;多层感知机模型将碎片云中的质量进行了局部均匀化处理,具有较强的外推能力;多层感知机模型通过学习 1~12 µs 的碎片云质量分布,能够以一定精度预测 24 µs 时刻的质量分布;反卷积模型的预测时间为毫秒量级,多层感知机模型的预测时间为秒量级。
关键词:超高速碰撞碎片云;深度学习;多层感知机
0 引 言
人类航天活动日趋频密,空间碎片数量急剧增加,对航天器构成了严重威胁。目前,以国际空间站为代表的长期在轨航天器一般采用 Whipple 防护屏[1] 技术进行空间碎片防护,基本思想是在航天器舱壁前一定距离处设置一薄板,在空间碎片(下文通称为弹丸)超高速碰撞(Hyper-Velocity Impact,HVI)下形成碎片云,使入射弹丸动能被高度分散,从而实现对航天器的有效保护。碎片云侵彻能力的影响因素包括碎片云形状、质量分布以及速度等。因此,为了设计更加有效的防护结构,研究弹丸超高速碰撞薄板形成碎片云的质量分布及其随时间变化规律具有重要意义。
对超高速碰撞碎片云进行理论研究非常困难,在二级轻气炮上开展地面超高速碰撞试验是更为有效的研究手段。与试验相比,数值模拟在成本、效率、参数范围以及数据获取等方面存在优势,越来越受到研究者重视,提出了多种工程模型来快速预测碎片云形状、质量分布以及速度分布等特性,郑建东[2] 、邸德宁[3] 等对此进行了较为系统的综述。Schafer 模型[4] 是较为典型的碎片云工程模型,它将碎片云简化为 1 个均匀椭球壳、1 个内切于该椭球壳的均匀球壳以及 1 个位于碎片云前端的大碎片。黄洁[5] 、马兆侠[6] 等从碎片云每个碎片的特征量(包括质量、速度和空间角度等)统计规律出发,构建了一个基于概率的碎片云工程模型。这些工程模型的计算效率非常高,但往往过度简化、精度不高。近年来,研究者开始探索神经网络技术在空间碎片防护领域的应用。Ryan 等[7-9] 利用人工神经网络技术预测铝球能否击穿铝板,并与经典弹道极限方程对比,结果表明人工神经网络在训练参数范围内精度较高,主要缺点在于外推能力很差。Hosseini 等[10] 采用人工神经网络技术拟合了靶板穿孔直径与弹丸半径、靶板厚度、弹丸质量、碰撞角度、弹丸和靶板材料等因素之间的关系。刘源等[11] 基于测量得到的超高速碰撞声发射信号的时域特征、频域特征以及小波能力分数,利用人工神经网络技术自动识别损伤模式(成坑和穿孔等)。
给定一组输入参数,生成一幅灰度图,条件变分自 编 码 器 ( Conditional Variation Auto Encoder, CVAE) [12-13] 的功能与此类似。前期,本文研究团队[14] 对采用 CVAE 模型预测碎片云形状变化过程进行了初步研究,输入参数为弹丸速度、弹丸半径、靶板厚度和观测时间,输出结果为一个 100×100 的矩阵,表征了碎片云的二维质量分布。初步研究结果表明 CVAE 模型预测精度远高于传统工程模型,且计算效率远高于数值模拟;但是 CVAE 模型也存在一个严重问题,即模型几乎没有外推能力。为改善模型外推能力,本文将像素点的 x 和 y 坐标也视为输入参数,则预测结果为一个空间点的灰度值,是一个标量。这样,通过采用多层感知机模型(Multi-Layer Perceptron,MLP),通用近似定理可以从理论上保证预测精度,从而有可能提高模型的外推能力。此外,对于数值模拟而言,同一组输入参数生成的图像是固定的,导致 CVAE 模型中的编码过程并非必要,可以直接对输入参数进行解码,得到反卷积模型( De-Convolutional Neural Networks, DCNN) 。因此,本文通过系统比较 MLP 模型和 DCNN 模型,重点考察模型的外推能力。
1 数据与模型
1.1 数据集
本 文 采 用 光 滑 粒 子 流 体 动 力 学 ( Smoothed Particle Hydrodynamics,SPH)数值模拟结果作为训练集,由 PTS 软件[15] 批量计算。以弹丸(铝球)超高速正碰撞靶板(铝板)作为算例。坐标原点为弹丸与铝板的初始接触点,以沿着速度方向–4~10 cm、垂直速度方向–7~7 cm 的方形区域(忽略反溅碎片云后部质量较少的区域)作为问题域,将该区域划分为 100×100 的网格,统计每个小网格中的总质量 mij,并以这 1×104 个数据表征碎片云质量分布。
数值模拟中弹丸速 度 v 的范围 为 3~ 8 km/s (间隔 1 km/s),弹丸半径 r 范围为 2~8 mm(间隔 1 mm),靶板厚度 d 范围为 1~4 mm(间隔 1 mm),观测时间 t 范围为 1 ~12 µs(间隔 1 µs),共 2016 个数据作为训练集。
1.2 DCNN 模型
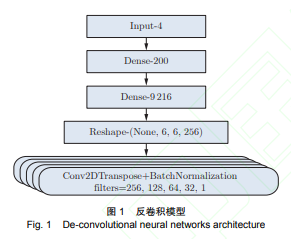
Bhowmik 等[16] 采用 CVAE 模型对蛋白质折叠进行了模拟,解码器包括 1 个全链接层和 4 个的反卷积层。本文借鉴该结构设计了如图 1 所示的反卷积模型。模型采用 2 个全链接层升维,通过 5 个反卷积层 ( filters=512,256,128,96,1)加批量归一化层[17] 生成最后的质量分布图像。
2 模型评估
两个模型实现都采用 Keras 函数库,后台使用 TensorFlow 深度学习框架执行模型训练。损失函数统一采用均方误差(Mean Square Error,MSE),模型优化使用 RMSProp 算法,两个模型的参数数量都在 100 万左右。对于 DCNN 模型,在 NVIDIA K6000 GPU 卡上训练 400 个 epochs 大约需要 5 h;而对于 MLP 模型,训练 200 个 epochs 大约需要 11 h。加载已经训练好 的 DCNN 模 型 和 MLP 模型后 , 在 i7- 6700CPU、内存 8G 的台式计算机上生成 1 个碎片云图像的平均时间分别为毫秒量级和秒量级。
2.1 模型还原能力
本节考察模型复现训练集中数据的能力。取弹丸速度 8 km/s、弹丸半径 2 mm、靶板厚度 4 mm,此时弹丸半径较小、靶板较厚,弹丸破碎比较严重。图 3 为此参数条件下的数值模拟结果和模型预测结果对比。取弹丸速度 8 km/s、弹丸半径 8 mm、靶板厚度 1 mm。此时弹丸较大、靶板较薄,弹丸破碎不严重,形成了一个中心大碎片。图 4 为在此参数下的数值模拟结果和模型预测结果对比。
从图 3 和图 4 中可以看到,深度学习模型预测精度远高于传统工程模型。此外,DCNN 模型能够捕捉到碎片云中质量分布的颗粒化性质,而 MLP 模型对碎片云中的质量分布进行了均质化处理。
2.2 模型内插能力
本节考察模型在训练参数范围内的插值能力。取弹丸速度 3.5、5.5 和 7.5 km/s,靶板厚度 1.5 mm,弹丸半径 7.5 mm 以及观测时间 7.5 µs,共 3 个算例,模型预测结果与数值模拟的对比如图 5 所示。可以看到,插值结果连续且稳定,与数值模拟结果吻合。
2.3 模型外推能力
设计如表 1 所示的 4 组算例,分别测试模型在弹丸速度、弹丸半径、靶板厚度和观测时间 4 个变量方向的外推能力。表中加粗数据表示该数据在训练参数范围之外。4 组算例 G1、G2、G3 和 G4 的数值模拟结果与对应的模型预测结果对比如图 6~9 所示。
从图 6 和图 7 可以看到,MLP 模型的外推能力明显优 于 DCNN 模型。从 图 7 还可以看到 ,参 数 r 越大,预测图片上的穿孔直径(图中碎片云与靶板重合区域的横向宽度)也越大,说明两种模型都学习到了参数 r 与靶板穿孔直径之间的关系,但是 MLP 模型的外推能力更强。
从 图 8 可以看到 , MLP 模 型 在 d 为 6 mm 和 8 mm 时预测的靶板不再是标准的长方形,因为预测结果具有一定误差。但是从总的趋势来说,参数 d 越大,MLP 模型预测的靶板厚度也越大,表明 MLP 模型通过学习知道了参数 d 与板厚之间的关系,而 DCNN 模型没有学习到这一点。
从图 9 可以看到,DCNN 模型在时间方向几乎没有外推能力,而 MLP 模型能够从 1~12 µs 的图像中学习规律,并且以一定精度预测 24 µs 的图像。 表 1 中 16 个算例的误差分布如图 10 所示,可以看到最大平均误差约为 4%。
总的来说,MLP 模型的外推能力明显优于 DCNN 模型。在图像识别领域,大量研究结果[20-21] 表明,卷积网络结构更倾向于关注图像的纹路等细节特征,而忽略图像的整体形状,这和本文的反卷积模型的表现类似。多层感知机模型的精度有数学定理保证,外推能力也较强。
3 结 论
本文系统比较了反卷积模型和多层感知机模型在预测超高速碰撞碎片云二维质量分布时的优缺点,研究结果表明:
1)在训练参数范围内,反卷积模型和多层感知机两种模型都具有较高精度。
2)反卷积模型能够捕捉到碎片云的颗粒化性质,但是外推能力较差。
3)通过将位置信息加入到标签数据,使得多层感知机模型的精度具有数学理论保证。多层感知机模型对碎片云质量分布进行了局部均匀化处理,外推能力较好。——论文作者:周浩,李毅*,兰胜威,刘海
本文来源于:《实验流体力学》是中国空气动力学会主办的综合性学术兼技术刊物,为航空、航天类中文核心期刊。主要刊载实验流体力学及相关领域的新信息、新成果和新动态。读者对象为从事实验流体力学及相关学科的学术研究、设计、制造与应用等的广大科技人员和院校师生。
