
 >
>激光基准桥梁挠度检测图像处理算法研究
时间:
摘要:针对桥梁结构健康安全运行自动化检测的需求,利用激光基准的嵌入式桥梁挠度图像式检测原理,设计了透射式靶标的光斑中心检测算法。针对透射式激光靶标光斑中心的高精度实时检测,提出了一套光斑中心坐标的快速读取方法。该方法首先对第一帧光斑图像采用金字塔模型获取其ROI区域;然后,采用基于序列图像块搜索方法快速获取后续图像的光斑图像的ROI区域;最后,在ROI区域内检测光斑的边缘,通过椭圆拟合的方法获取光斑图像的亚像素中心。该算法从应用层面解决了高精度和实时性的矛盾,保证了测量精度和效率。经实测发现:该算法挠度值的测量误差小于0.1像素,数据更新时间小于200ms,同时满足了高精度和实时性的要求。
关键词:桥梁挠度;光斑图像;金字塔算法;椭圆拟合;ROI区域;光学智能靶标
0引言
桥梁的挠度是桥梁运行状况的常用度量参数[1],在桥梁的负载评估、健康监测、温度效应、应力损失上得到极为广泛的应用,是桥梁健康状况评价的重要参数指标,可以对桥梁的承载能力进行评估,指导桥梁的维护维修工作[2-3],因此,有必要对其长期监测,确保桥梁结构服役可靠性,提升其安全保障能力。
目前出现的新型的非接触式的挠度测量方法,主要有如下几种:
(1)倾角仪法[4]:国内已经研制出了电容传感无源伺服式倾角仪。但这种方法使用复杂,在桥梁的动态挠度测量方面,对各倾角仪之间的相位差、倾角仪的瞬态反应、倾角仪零漂等的要求较高。
(2)连通管法[5]:此法可实现连续在线测量,但是该方法不适用于跨度大,纵坡大的桥梁,因为水平面高差相距太大,造成测量不准确。
(3)光电成像和CCD摄像法[6]:该法是架设摄像机对准靶标,记录振动情况,通过计算机得到挠度数据。因用标准摄像机,采样频率为25Hz,高频丢失,难以实现多点同步检测。
(4)光电分光成像和高速线阵CCD法[7]:该方法利用光电转换器接受发光靶标的一种特定波长的单色光,进行A/D转换,得出测量值。
本文将高精度激光基准和光电图像处理相结合,提出了一种实时、全天候自动化桥梁挠度监测方案,论文主要针对桥梁挠度过程中的核心算法———激光光斑图像快速检测算法展开研究,其结果对提高系统的检测精度和实时性具有较强的指导意义。
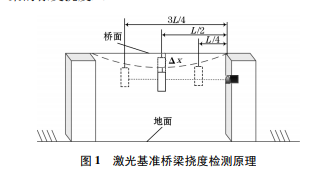
1激光基准桥梁挠度检测原理
如图1所示,激光基准桥梁挠度图像式检测仪是利用激光在大气中的直线传输作为基准,利用透射式成像靶标将桥梁的挠变位移转化为光斑在标靶平面上的位移,再根据视觉图像处理算法解算出被测点的光斑中心位移量便得到该点的挠度值。检测时在桥梁梁体上部指定几个待测点,一般选取跨中L/2点或者L/4将测量靶标安放在待测位置处,同时将基准激光发生器安放在桥墩某固定部位,此时激光束在测量标靶上打出一个激光光斑,调整出瞳焦距将激光光斑调整到合适大小。在桥梁未加载前先对待测点进行测量得到激光光斑在标靶上的初始位置坐标(x0,y0),桥梁加载之后再次对待测点进行测量得到激光光斑的位置坐标(x1,y1),则桥梁的待测点2次测量的光斑位置沿x方向和y方向的距离之差分别为:Δx=x1-x0和Δy=y1-y0,由此可以得到待测点的挠度值(不含桥梁的徐变挠度)。
2光斑图像获取
系统测量光斑图像获取是通过光学智能靶标得到的,光学智能靶标装置可以将激光光束转换成图像信息并通过CCD采集,然后转换为数字图像信号[8]。
2.1视觉读数智能靶标装置
视觉成像检测系统主要由光图转换靶、CCD像机、滤光片、成像镜头、DSP图像信号处理器、人机交互显示板和无线发射装置等部分组成,如图2(a)所示。基准光束照射在透射式光图转换靶靶面上形成一个光斑,位于靶标后方的CCD像机拍摄靶标的光斑图像,DSP图像信号处理板采集像机的图像信号,并将其转换为数字图像信号进行解算,得到光斑的位置信息,即可得到挠度值。智能靶标采用透射式光图转换方式,靶面由漫射材料制成,以滤除背景杂波提高信噪比,改善像质。靶面后置CCD成像装置,镜头到光学标靶的距离为d,其原理如图2(b)所示。
2.2激光光斑图像特性分析
标靶平面的光斑光强分布接近于高斯分布[9]。图3(a)为激光光源距标靶70m所采集到的光斑图像,提取其中心位置附近多行的像素点灰度值进行分析,图3(b)为其灰度分布图,可见其分布基本接近高斯分布。
3激光光斑图像ROI检测算法
为满足系统实时高精度检测性能的要求,需要研究一套快速的图像光斑中心检测算法,本文通过对图像特征的分析,将金字塔快速ROI区域检测算法引入光斑区域检测,满足了光斑实时性的要求。
ROI(regionofinterest)即图像中的感兴趣区域[10],光斑图像检测重点是靶图像上的光斑区域,即光斑的ROI。显然,标靶图像中光斑且占整幅图像的比例较小,若每一帧序列图像中都遍历所有像素点来提取光斑,将大幅增加运算量并占用大量的存储空间导致耗时较长,不利于实时性要求。为提高处理效率,在此将金字塔模型ROI检测算法引入,这样只需遍历少量的像素点即可搜索出光斑所在的区域,然后在ROI区域内进行光斑的检测,这样可以大幅提高处理器的效率。金字塔模型[11](如图4),表示一幅图像的不同尺度集合,其所有图像都是由同一幅源图像降采样得到。
相关知识推荐:桥梁工程方面的核心期刊有哪些
高斯卷积后的模糊图像进行亚采样,如图5所示,去掉偶数行和偶数列,将图像的尺寸缩小为原来的1/4。如此多次尺度变换后,得到多种尺寸表达的标靶图像。标靶图像原始尺寸为720×576,即标靶图像最多可建立5层金字塔图像,最顶层的图像尺寸为36×45。金字塔层次越高,所包含的信息量就越少,越容易丢失光斑信息。金字塔层次越低,程序的运算量就会随之增大。综合考虑,构建3层的标靶图像金字塔,即将采集到的标靶图像做2次尺度变换操作,最顶层的图像G3(i,j)尺寸是原图G1(i,j)的1/16,如图6所示。
观察图3(b)可见光斑中心的灰度值集中于250左右,给定一个临界值ε,认为|G3(i,j)-250|<ε的像素点属于光斑图像的ROI,为了便于光斑图像的进一步处理,在图像G3中搜索尺寸为n×n的正方形ROI区域,记为G3(ROI)。G3(ROI)丢失了许多光斑细节信息,为保证光斑中心的准确定位需找出图像G1的ROI,可以通过G3(ROI)在图像G3位置映射出G1(ROI)的位置图6(b)。设G3(ROI)的行坐标与列坐标范围分别为G3row[xmin,xmax]、G3col[ymin,ymax],则可以得到G1(ROI)的行坐标与列坐标范围G1row[4xmin+1,4xmax+1],G1col[4ymin-1,4ymax-1]。如图7所示为标靶图像金字塔检测得到的G1(ROI)和G3(ROI)。
4基于椭圆拟合的光斑中心亚像素定位
为提高检测精度,将图像中的像素点划分为更小的像素单元求取光斑的中心点,即采用基于亚像素处理的激光光斑中心定位算法[13]。通过对多幅激光标靶图像观察发现,激光光斑形状类似于椭圆,因此用椭圆来描述激光光斑的形状更加精确,这里提出基于椭圆拟合方法求取光斑中心亚像素检测算法[14]。
基准光源到标靶平面的距离不同,标靶图像的光斑大小也会存在差异。使用sobel算子提取到光斑图像边界像素点个数约100到800之间不等,椭圆拟合过程中要选取6个边界点作为潜在椭圆边界点,则至少有C6100种选择方法,由于DM642芯片资源限制和时间要求,不可能遍历这么多次边界点,一般多次随机选取边界点进行拟合,然后选择最优的拟合参数。
若不恰当地选择边界点或者随机选取边界点中包含误差点都会影响拟合的结果,如图8中黑色的点代表选择边界点,对比图8(a)和图8(b),选择不同的边界点所拟合的椭圆相差极大,这样计算的光斑中心会存在很大的误差,即使进行多次拟合也难以避免随机选择而表现出来的不确定性。
5实验结果
在实验室内利用桥梁挠度检测原理样机进行实验,利用DM642开发板作为图像处理单元,编写图像处理算法程序并使用XDS560仿真器进行在线硬件仿真,CCD像机使用1/2英寸的WAT902H2高灵敏度星光级CCD像机,分别进行ROI提取和光斑定位算法实验。
5.1ROI检测实验
利用原理样机采集光斑图像,利用本文的算法进行ROI的区域检测,观测对整幅图像和只对ROI进行预处理程序运行所需要的时间进行对比,见表1。
对比表1中的数据发现只针对标靶图像ROI区域进行预处理操作,图像滤波、阈值分割等程序运行时间明显减少,实时性明显提高。
5.2激光光斑中心定位实验
利用设计的原理样机采集多幅图像,以重心法[15]作为参考,对比重心法、椭圆拟合[16]和区域分割的椭圆拟合法计算光斑的中心,比较以上3种方法的计算结果如图9和表2所示。
比较以上方法的结果发现基于区域分割随机选取边界点比普通随机选取边界点的椭圆拟合法的结果更接近于重心法的计算结果,算法更加稳定。重心法只遍历一次图像且计算简单,消耗时间非常少,椭圆拟合算法多次遍历图像边界点,计算复杂,所以消耗的时间比较多[17]。虽然重心法计算效率高,但是由于检测系统应用于室外,难免会受到外界强光的干扰,使用椭圆拟合法的抗干扰性更好。
6结论
本文提出的透射式靶标的光斑中心检测算法,通过ROI区域的快速提取和基于区域的光斑高精度重心定位方法可以明显提高激光基准桥梁挠度在线系统的实时性和检测效率。该方法将图像快速性和高精度结合起来考虑,准确而方便地获取了系统的测量值,对同类系统乃至其他系统有重要的参考价值。但算法在野外现场的抗干扰性能和实时性能还有待进一步的研究。——论文作者:赵宏伟1,宋云峰1,王会峰2,黄鹤2,关丽敏2,穆柯楠2
