
 >
>地面干涉雷达技术在公路桥梁动态检测中的应用
时间:
摘要:为探究地面干涉雷达技术在公路桥梁动态检测中的实际应用效果,本文以某公路桥梁为依托,当列车行驶后,采用IBIS-S系统对该桥梁的竖向挠度和横向挠度进行检测,结果表明:IBIS-S系统可短时间内精准测定桥梁竖向挠度和横向挠度,其中,该桥梁1/4梁跨竖向挠度值最大为1.46mm,满足规范要求;该桥梁1/2梁跨横向挠度值最大为1.86mm,满足规范要求。
关键词:公路桥梁检测;地面干涉雷达;竖向挠度;横向挠度
0引言
近年来,我国基础设施建设高速发展,这其中也包括公路桥梁的建设。我国人口数目众多和地域广泛决定了公路桥梁的数目和使用频率,随着车辆数目、载重的逐年递增,公路桥梁所承受的负荷也愈加沉重,主要表现为力学响应和振动加剧导致的桥梁挠度增大,从而对桥梁的稳定性造成影响,甚至会对其结构造成破坏,不利于车辆行驶的安全性。因此,对桥梁的安全性、使用寿命进行评价具有重大意义,其中桥梁振动参数是对桥梁使用性能进行评价的一项重要指标,该参数主要包括梁体竖向位移、振动频率、振幅等[1]。
目前的检测方法主要分为两类,一类是采用全站仪、加速传感器和GPS等仪器进行测量,该类方法是通过单点测量结果对区域形变趋势进行预估,其也是应用最为广泛的一类;另一类是通过连续点测量来获取检测区域的变形趋势,其典型为InSAR技术。采用全站仪进行测量时,其适用范围广、测量精度高,但工作环境复杂多变、工作周期长、不可控因素较多;采用加速传感器测量后的精度普遍要高于全站仪测量,但其适用范围较小、仪器安装过程复杂;采用GPS进行测量时可获得测量点的三维坐标,但获取的数据量十分巨大,难以分析,定位误差也较难控制,同时只能对单点进行三维定位,无法对所测区域的形变趋势进行预测。InSAR技术则可以克服上述测量方法的种种弊端,实现全天候实时检测和远程大区域连续检测,但星载、机载InSAR的观测周期长,其时间和空间分辨率也较低[2]。为此,研究人员将星载、机载InSAR转型为地面干涉雷达技术,二者的工作原理基本一致,但地面干涉雷达技术的效率显著高于星载、机载InSAR技术,其可以在短时间内获取高分辨率的雷达映像,具备高机动性等特性。
时至今日,地面干涉雷达技术已经在国内逐渐推广应用,并取得了一定的研究成果。中国科学院电子学研究所开发了一套地基SAR系统,将其命名为ASTRO;国防科技大学研发出了一套车载SAR系统;武汉大学于国外引进了IBIS系统[2],并将其应用于实际工程中,取得了良好效果,此后,陆续有人对IBIS系统进行深入探究。谢润[4]采用非接触式雷达微波干涉IBIS-S遥测系统对动载作用下的桥梁位移影响线进行检测,结果表明,该系统可精确获取区域变形趋势;周文明等[5]探讨了采用IBIS系统对高速铁路桥梁、声屏障、雨棚等检测时相关参数的选取;谭兆等[6]提出了采用IBIS-S系统检测地铁屏蔽门的方法。可见,前人对地面干涉雷达技术进行了系统地研究,但在工程实际应用方面尚显不足。本文基于某实体工程,应用IBIS-S系统对某公路桥梁的梁体竖向挠度和横向挠度进行检测,通过检测数据对该桥梁使用性能进行评价。
1工程实践
1.1工程概况
本文所依托实体工程为某公路桥梁32m连续梁,采用I-BIS-S系统对行车通过上行线和下行线时的竖向挠度、横向挠度进行检测。
1.2竖向挠度动态检测
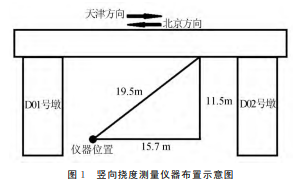
采用IBIS-S系统对行车通过该公路桥梁上行线和下行线时,1/4梁跨的竖向挠度进行检测。本次检测分别于2014年11月5日、2015年6月11日和2015年12月16日共进行3次。将仪器放置于两墩间梁跨的正下方,偏近于D01号墩,仪器布置示意图如图1所示。
通过信噪比检测,选取了距IBIS-S传感器19.5m、21.1m、22.6m和23.3m四点进行检测,其中列车通过上行线时的竖向挠度检测数据如图2所示。
从图2中所示趋势可知,该四点处的曲线趋势基本相同,其中418~422s时间段内4条曲线先上凸后下凹。曲线上凸的原因主要是行车于上行线运行时,先经过D03、D02号墩,由于D01、D02和D03号墩为一体,故D01和D02号墩间梁体向上翘起;曲线下凹的原因主要是行车于421s后经过D02、D01号墩,行车的自重作用于该段梁体,导致曲线下凹。
行车通过该段桥梁下行线时的竖向挠度检测数据如图3其中647~652s时间段内4条曲线先下凹后上凸,这与图2中趋势刚好相反。造成曲线下凹的原因主要是列车于647~649s时间段内经过D01、D02号墩,该段梁体在行车自重作用下表现为下凹;造成曲线上凸的主要原因是列车与650~652s时间段内经过D02、D03号墩,由于D01、D02和D03号墩为一体,故D01和D02号墩间梁体向上翘起。
2014年11月5日、2015年6月11日和2015年12月16日共3次1/4梁跨竖向挠度观测结果见表1。
从表1中数据可以看出,3次梁跨检测结果间的误差均在可接受范围内,上行线的竖向梁跨检测结果普遍高于下行线。公路设计规范中对于32m双线连续梁的竖向挠度限值规定为20mm,而表中的梁跨竖向挠度最大为1.46mm,远低于规范要求。结果表明,该段桥梁的1/4梁跨竖向挠度检测结果满足规范要求,行车于其上运行时处于安全状态。
1.3横向挠度动态检测
采用IBIS-S系统对列车通过该公路桥梁上行线和下行线时,1/2梁跨的横向挠度进行检测。本次检测于2014年11月5日、2015年6月12日进行。
检测过程中,将仪器放置于D05-D06、D06-D07、D07-D08号墩间1/2梁跨位置处。通过信噪比检测,选取了距IBIS-S传感器16.5m和17.2m两点进行检测,其中行车通过上行线时的横向挠度检测数据如图4所示。
从图4中所示趋势可知,两条曲线的趋势走向基本相同,曲线在200-203s时间段内表现为下凹,同时出现了类似正弦波曲线。造成这种趋势的主要原因是行车于上行线运行时,桥梁上行线受到行车自重作用而下沉,下行线则刚好相反处于上翘状态,故曲线呈现下凹趋势。
相关知识推荐:公路行业期刊发表需要多少钱
行车通过该段桥梁下行线时的横向挠度检测数据如图5
从图5中所示趋势可知,两条曲线的趋势走向基本相同,曲线在75~79s时间段内表现为下凹,同时出现了类似正弦波曲线,这与图4去向走向刚好相反。造成这种趋势的主要原因是行车于下行线运行时,桥梁下行线受到行车自重作用而下沉,上行线则刚好相反处于上翘状态,故曲线呈现上凸趋势。
2014年11月5日和2015年6月11日共2次1/2梁跨横向挠度观测结果见表2。
从表2中数据可以看出,2次梁跨检测结果间的误差均在可接受范围内,上行线的横向梁跨检测结果普遍高于下行线。公路设计规范中对于32m双线连续梁的横向挠度限值规定为8mm,而表中的梁跨横向挠度最大为1.86mm,远低于规范要求。结果表明,该段桥梁的1/2梁跨横向挠度检测结果满足规范要求,列车于其上运行时处于安全状态。
2结论
针对地面干涉雷达技术在桥梁动态检测中的实际应用效果评估,本文以某公路桥梁为依托,进行了相关性能参数检测,主要取得以下结论:
(1)基于1/4梁跨竖向挠度检测结果可知,当行车于上行线行驶时,竖向挠度曲线表现为先上凸后下凹趋势;当行车与下行线行驶时,竖向挠度曲线表现为先下凹后上凸趋势,二者恰好相反。3次检测结果中1/4竖向挠度值最大为1.46mm,远低于规范限定值20mm,表明列车于该段桥梁上行驶时的竖向挠度变形符合规范要求。
(2)基于1/2梁跨横向挠度检测结果可知,当行车于上行线行驶时,横向挠度曲线表现为下凹;当行车于下行线行驶时,横向挠度曲线表现为上凸,二者恰好相反。2次检测结果中1/2梁跨横向挠度值最大为1.86mm,远低于规范限定值8mm,表明行车于该桥梁上行驶时的横向挠度变形符合规范要求。
(3)本次实际工程应用结果表明,地面干涉雷达技术可精准检测桥梁的横向和竖向挠度,同时设备安装容易,操作简单,检测周期短,效率高,输出数据趋势清晰明了,推荐其于公路桥梁动态检测中推广。——论文作者:罗剑
