
 >
>考虑多特性因素的路网交叉口群动态划分方法
时间:
摘要:基于原有的路径关联性模型,综合考虑车辆离散性、阻滞性和局部路网交通流空间特征规律,建立了相邻交叉口间的路径关联性模型,弥补了初始模型仅考虑单一指标的不足;根据路径关联度模型的计算结果,利用聚类分析对信号控制交叉口群进行了动态划分。案例分析和仿真结果表明:协同考虑多重特性因素的路径关联度模型动态划分交叉口群,可以提高区域信号协调控制效果和车辆通行效率。
关键词:交通信息工程及控制;交叉口群;关联度;离散性;阻滞性;动态OD路径
0引言
城市路网交叉口关联度是衡量道路中某个交叉口与其他交叉口相互关系强弱的指标。交叉口群是城市道路网络中具有较强关联性的多个相邻交叉口及其中间路段的集合,交叉口关联度是划分交叉口群范围、判断是否需要进行协调控制的重要依据。马莹莹等[1]以流量饱和度和自由流行程时间为关联度计算指标,建立相邻交叉口关联性的拉普拉斯矩阵,以此作为划分交叉口群范围的工具;Yagoda等[2]认为交叉口之间的相关性主要与路段上的流量Q和长度L有关,并使用耦合指标表示两个交叉口之间的相关性。胡华等[3]认为影响相邻交叉口关联性的因素包括路段长度、上游交叉口车流量及其到达规律。马万经等[4]首次考虑了交通流的空间变化,以流量比为特征,应用聚类分析方法确定各交叉口群的划分范围。综上所述,以往的研究表明,现有关联度模型大多反映了交叉口两段之间的关系[5-10],难以表现网络中多交叉口相互影响的综合效益,且缺乏考虑交叉口间局部交通流空间的动态变化。因此,在原有模型基础上,建立相邻交叉口之间的路径关联度模型全面考虑了多种关联度指标和交通流的动态变化,并根据所建模型的计算结果应用层次聚类法对交叉口群进行动态划分[11,12]。
1关联指标选取
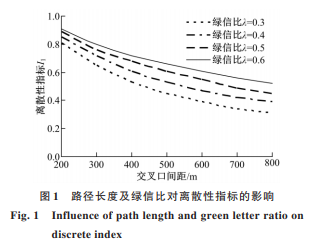
1.1离散性关联指标
为反映车流运行特性和路径长度对关联度的影响,将车队离散性加入路径关联度计算模型中。假设一个车队在路径开始时车头时距为hˉ0,到达路径末端时不会发生车辆驶入、驶出或者超车现象,行驶车辆仅受车队离散因素影响,平均车头间距变为hˉd,那么hˉ0qˉd,其中,qˉ0为路径起点的平均流率;qˉd为路径终点的平均流率。
1.2阻滞性关联指标
滞留排队属于关联交叉口的交通负面效应之一,并且与交叉口距离、平均车速、车道渠化等因素有关,处理不当就会出现路口车辆溢出现象,也应当考虑到路径关联度模型当中。
结果表明:当路径仅包含一个路段时,交叉口饱和度与交叉口间距对I2均有较大影响。I2值随交叉口间距的增加而减小,在交叉口间距较小时饱和度对I2值影响较为显著,同时饱和度越大,因滞留车队的影响,I2也会增大。随着间距增大,其对I2值影响的差异性降低。
1.3OD路径关联指标
两个指标未考虑局部路网动态交通流路径分布情况,对于有信号灯控制的交叉口之间存在连接住宅区或商务楼的支路,这些支路有早晚高峰进出流量大、车流OD路径分布明显等特点,如图4所示。
通过分析局部路网交通流路径分布可较准确地判断下游交通量来自于上游的百分比,提高相邻交叉口关联强度的判别,减少交叉口群边界的控制延误和停车次数。
假设O为交通生成的集合点;m为维度;D为交通吸引点的设置;n为维度;任何一对OD之间的交通流量为Qod;部分区域道路网的交通流动态矩阵。
2.2交叉口群动态划分流程
聚类分析是一组统计分析技术,其将研究对象划分为相对同质的组。迄今已经提出了很多聚类算法,为能快速有效地处理大量数据,采用层次聚类方法对交叉口群进行动态划分。
相关期刊推荐:交通规划论文投稿的核心期刊
在基于层次聚类方法对交叉口群进行动态划分时,需要知道一定区域内路网各时段OD路径以及各交叉口各时段的入口流量,并将相邻交叉口的路径关联度作为其聚类指标,关联度阈值应提前设定。利用此方法划分交叉口群的步骤如下:
Step1在路网中设置交叉口和路段集,对不同时段OD矩阵进行动态加载。
Step2搜索所有路段,根据式(13)得到所有相邻交叉口的路径关联度值。
Step3选定相邻交叉口路径关联度阈值,若计算出的路径关联度值小于该值,则可以将上下游交叉口划分到不同的交叉口群。
Step4在整个区域内,将关联度高的相邻路径合并成主路径划入一个交叉口群内,并相应删除划分后的路段和交叉口,再一次确认此时路段集是否为空,若是转Step6,否则转Step5。
Step5搜索所有路口集合,根据最新生成的相邻交叉口关联度值与阈值进行比较判断是否能归入此交叉口群:若是,删除对应路段和路口。进一步判断路段集合是否为空,若是转Step6;否则转Step4;
Step6并入新的交叉口群,形成基于路径关联度的交叉口群划分方案,算法结束。
3实例验证与仿真分析
3.1路径关联度计算结果
以青岛市某区域路网为例,如图5所示。实地调查获取数据包括各交叉口渠化形式及转向流量,如表1所示。
转向编号包括3个字母,首字母为交叉口编号,第二个表示进口道方向,第三个表示驶出方向。如“FER-CSL-BER”表示车辆由东进口驶入交叉口“F”,再右转驶入交叉口“C”后左转驶入交叉口“B”,最后右转驶出。通过交通调查已知某时间段该路网有“ESR-FWL-CST”“GSLFER-CST”“DWT-EWL-BST-AST”3条主要OD路径,车流在路段中的平均速度为30km/h。采用回溯法分别计算路网内所有路径的关联度值I,表2为根据关联度值由高到低列出的前10条路径,可见,路径距离越小车流到达下游路口的脉冲式特征越显著,但当短路径交叉口流量较小时,车队排队滞留关联度指标减小,相应关联度值降低。以路径“BWT-CWT”为例,路径长度虽然小于路径“EWT-FWT”,但流量低,连续车队规模小,对下游路口车队排队滞留的影响较小,所以关联度值低于“EWT-FWT”。由此可见,本文模型能多层面反映交叉口间路径长度、排队滞留、车队离散和车流时空分布等因素。
3.2信号协调控制方案比较
为进一步验证路径关联度计算方法的合理性,选择此时关联度值排列在前5位的路径划分成2个交叉口群进行信号协调控制,如图6所示。仿真结果表明,关联路径的识别有助于提高信号协调控制效率。
现有方案是采用绿波控制思路分别对“DWT-EWT-FWT-GWT”、“BWT-CWT”路径实施线控,方案二将该区域路网划分成图6所示的甲、乙两个交叉口群,每个交叉口群确定一个公共信号周期,依据路径关联度确定协调方向并对相位差和相序进行优化。对于交叉口群甲,将E设为关键交叉口,优先协调路径“DWT-EWLBST-AST”获得最大绿波带宽,再协调路径“EST-BST-AST”。同样于交叉口群乙,优先协调路径“GSL-FER-CST”获得最大绿波带宽,再协调路径“FST-CST”,如图7所示。
通过Synchro7仿真分析各控制方案,获得协调前、后各交叉口的车均延误与停车率等评价指标,如图8所示。在实行路径协调控制后,此区域交通运行效果得到提高,方案二中车均延误和停车率降低幅度值分别为7.3%、20.4%。但在方案二中,对于交叉口群乙,由于公共周期长度远大于交叉口G自身最优周期长度,导致西向东车均延误增加了19.4%。对关联度高且实施协调控制的路径而言,虽然调整了个别转向的优先级,运行状况稍有降低,但通过优化,区域路网的交通运行效率总体上明显提高。结果表明,通过计算各路径的关联度可有效地找到交叉口群内的协调相位差,提高路网交通运行效益。
4结束语
综合考虑路径长度、路口流量、排队长度、车流离散和OD路径分布等影响因素,建立的系统模型能较好弥补单指标模型的不足,基于多因素交叉口群动态划分方法也为关联度值的计算提供了一种新思路,实例表明,该方法能提高交叉口群划分的合理性,减少车辆在路段上的停车次数和控制延误,提高区域路网运行效率。——论文作者:曲大义,贾彦峰,刘冬梅,杨晶茹,王五林
