
 >
>“水下风筝”发电系统试验平台设计及仿真
时间:
摘要“水下风筝”是一种采用锚泊运动平台的海流发电系统,能够用较小尺度的发电装置平台在较低流速环境下发出较高的电能,其发电原理具有一定的先进性。同时“水下风筝”在工程化实现中也存在较高的技术难度,比如适用于水下大幅度高速运动的平台流体动力和结构设计、系留电缆的连接形式和强度、水下运行状态监测及维护等问题。鉴于以上技术问题,本文设计了一种“水下风筝”发电系统试验平台缩比模型,并开展了流体动力仿真及性能预估。初步获取的流体动力参数和运动性能显示,缩比模型能够在较低流速环境下按规划轨迹获取较高的运动速度,达到速度放大的效果。本试验平台缩比模型可为系统等比例样机研制奠定技术基础。
关键词海流能,水下风筝,发电,仿真
1.引言
随着工业化和城市化进程的加快以及环境保护越来越受到人们的重视,能源消费尤其是对清洁能源的需求在迅猛增长。传统不可再生能源已难以满足人类社会发展对能源快速增长的需求,新能源尤其是可再生清洁能源的开发已成必然趋势。海流能作为海洋可再生清洁能源的重要组成部分,具有能量密度大、周期性强并且稳定可靠等特点,已成为世界各国开发的热点[1][2]。目前已开发出大量用于海流发电的试验设备,部分已开始商业化试运行。
海流发电技术目前遇到的最大困难是受恶劣海洋环境影响,发电设备的制造、安装及维护成本非常高,与常规能源相比,现有的新能源技术还难以在成本和效益上达到同等的竞争力,因此急需一种具有低制造及运行维护成本的发电装置。“水下风筝”发电技术采用锚系运动平台的结构形式,发电装置平台锚泊在水下一定深度,当流速达到设计值时舵机启动,根据流速的变化范围进行实时自动控制,平台在操舵控制下在较低流速环境下产生规划轨迹下较高速度的运动。类似风筝拴在海底,通过控制使发电装置随着海流的运动“飞”起来。平台在水中的运动速度通常能够达到潮流流速的6~8倍,最大甚至达到10倍。这样较小的发电装置平台就有可能通过大范围的扫略捕获更多的海流动能。由于“水下风筝”的速度放大效果,相同功率下其尺度相比传统发电装置要小很多,因此发电装置的制造成本可能得到大幅下降。
作为“水下风筝”发电装置的核心,平台的设计是整个系统的关键,其流体动力外形、衡重参数配置、叶轮设计等直接影响系统的发电效率。本文对“水下风筝”缩比试验模型的平台外形及衡重参数开展设计及数值仿真,为获取系统的流体动力特性和运动控制参数提供理论支持。
2.发电装置平台设计
发电装置试验平台,其设计基本思想及原则如下:
1)“风筝”平台在水下高速大幅度运动会使系留缆(电缆)产生持续的较大张力,为尽量减小系留缆的拉力,“风筝”平台设计为中性(微正)浮力,平台保持质心浮心在水中平衡,保证系统水下系留姿态稳定,同时在运动时不会产生过大的张力影响系留缆的使用寿命;
2)发电机舱及浮力舱外形尺寸需要考虑为系统提供足够正浮力,具有较高的升阻比,以及满足发电机、控制模块、舵机、传感器及其他仪器设备的安装;
3)“风筝”平台在高速运动中会受到较大的冲击力,平台需要有足够的抗冲击强度,尤其是悬臂的升力翼和叶轮强度;
4)“风筝”平台系留稳定性与质浮心位置有关,设计时需要考虑平台的系留及运动稳定性。
除了考虑最佳流体动力性能,发电装置试验平台的另一个重要约束条件是必须考虑内部设备的安装空间,比如发电机舱中发电机、传动机构、舵机以及试验测试传感器和控制模块等的安装。综合以上因素,“水下风筝”缩比试验模型的主要设计参数如表1。
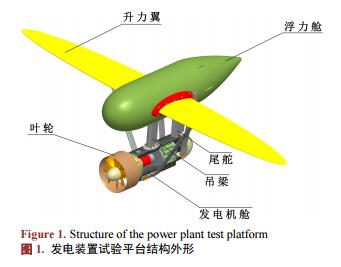
2.1.平台结构设计
发电装置试验平台结构主要由发电机舱、浮力舱、吊梁、尾舵、升力翼、带导流罩叶轮等组成,如图1。
平台总体外形设计主要考虑在相对低速的潮流中能够产生足够大的升力,从而使平台整体受力可以满足按设计的轨迹运动所需外力的要求,即有足够的过载。总体参数配置主要涉及到载体的质量、质心、浮力、浮心、转动惯量等,初步考虑系统可以具有微正浮力,并且既能保证非工作状态下的系留姿态要求,又能保证工作状态下的机动性。试验平台外形尺寸见图2。
2.2.翼形设计
升力翼、吊梁、尾舵等截面的翼型均从NACA系列中选取,主要考虑它们具有较大的升阻比和大曲率。升力翼翼型为naca4412,外形尺寸如图3所示。
吊梁在设计时除了需要考虑具有较低的流阻外,更重要的是需要具有足够的连接强度,并且保证平台在运动中有足够的结构稳定性。吊梁和尾舵的截面外形及型值分别见图4和图5。
2.3.叶轮设计
在设计叶轮时,根据水头、流量即可通过水轮机的相关经验公式选出叶轮的比转速ns值,然后再根据比转速计算圆整得出叶轮的转速[3][4]。叶轮的轮毂比参考相近比转速的轴流式叶轮,选取最小值为0.4,为了尽量使叶轮的结构形式简单,轮毂选用了柱形轮毂。叶片数选为8叶片。在确定了叶轮的基本参数后,即可采用奇点分布法对叶轮的各个截面进行设计,在设计时选取了五个截面进行设计,如图6所示。
采用奇点分布法设计轴流式叶轮是基于在轴流式叶轮的水力计算中广泛采用的圆柱层无关假设,即假定在叶轮区域内,水流在半径方向的分速度为零。在对五个截面上的叶栅翼型进行设计时,采用奇点分布法设计出无厚翼型的骨线,然后将NACA-0012翼型的厚度分布规律套加到骨线上,这样就形成了每个截面上的翼型。
在根据奇点分布法设计得到叶轮的叶片后,为了提高叶轮的性能,根据叶轮的单流道CFD性能预估结果对叶片的各个截面的进出口角进行了优化。叶轮的实体效果图如图7所示。
3.流体动力仿真及性能预估
3.1.流体动力参数仿真
发电系统实验平台总体流体动力特性数值试验,可以通过仿真计算来确定平台在不同流速环境中的流体动力大小。因为平台在水下运动,受自由面的影响可以忽略,因此可以采用数值水洞方法来进行模拟计算。
数值水洞仿真试验是一个不断优化的过程,其可以避免一些风洞试验中无法克服的问题,例如,大攻角或大舵角下航行器的晃动问题,以及风洞天平测力超量程问题等,仿真流程如下图所示。
基于fluent软件进行数值水洞试验得到的结果,数值水洞计算的典型流场如图9所示。
当不同攻角和侧滑角下的流场被模拟计算出以后,对平台表面所受到表面力进行积分就得到了平台所受到的流体动力,进一步进行系数化、求导等处理就可以得到运动特性分析所需要的各种流体动力参数和导数值。
由于载体只有一个对称面,因此其阻力特性随攻角和侧滑角的变化曲线将会不同,需要分别计算。图10为阻力系数随攻角的变化曲线,图11为阻力系数随侧滑角的变化曲线,图12为升阻比变化曲线。
3.2.系统运动特性仿真系统
运动特性仿真主要是建立系统的数学模型,并通过对数学模型的推演和求解来研究系统的运动性能。
平台水下空间运动数学模型分为动力学方程和运动学方程两大部分,采用水下航行体通用数学模型。“水下风筝”发电系统除了考虑平台的模型以外还要考虑系缆(电缆)的模型,类似锚系的缆索结构,可以通过建立计及流体动力的多体动力学分析模型来模拟其性能,并且将平台作为其一个端节点,来提供边界条件[5]。采用有限段法是将连续的系缆离散为一系列铰接缆段,应用多体理论进行动力学分析,随着段数的增多,段长的减小,计算结果将逐渐收敛于真实解。为兼顾计算精度和速度,在实际仿真中,可以将系缆划分成有限段不等长的刚性杆。
在上述数学模型的基础上进行系统级的数值仿真可以初步获得系统的特性,以此来验证是否达到设计目的和优化设计方案。多学科协同仿真主要涉及到结构、流体力学、多体动力学和控制学科之间的协同设计。
系统在设计流速范围内不同流速下进行数值仿真,获得包括平台运动速度、平台姿态、平台深度变化及系缆张力等系统参数,平台在水下运动的典型曲线如图13,仿真结果汇总如表2。
由图13可以看出,发电平台在水下海流环境下通过一定的控制策略可以实现倒8字形的增速运动由下表可以看出,平台在1~2m/s流速环境下能够获得超过7倍流速的运动速度,获得了显著的增速效果。对比瑞典Minest公司设计的“水下风筝”海流发电机,其发电装置平台的运动速度是海流流速的6~8倍,最高能够达到流速的10倍。因此,本文设计的试验平台达到了相应的效果。同时由仿真结果可以看出,作为承力和输电以及控制的系缆在平台大幅度高速运动状态下需要承受的张力也特别大,这将在工程实施上对系缆的可靠性提出极高的要求。
推荐阅读:水电工程检修评高级的论文核心期刊
4.结论
本文针对发电系统的缩比试验平台进行了初步的设计及流体动力和运动特性仿真,获得了相关流体动力参数和预估性能,结果显示“水下风筝”可以采用较小的平台实现在较低流速环境下的高速运动,相对于其他发电平台将有更强的捕获海流动能的能力。由于系缆在运动中受到较大的张力,在后续设计中需要考虑其抗拉和疲劳强度。本设计及仿真可为试验系统的详细设计提供理论依据。
“水下风筝”是一种较先进的海流发电系统,其基本原理以及可行性已在国内外相关研究及试验中得到验证,但工程化实施还需要继续开展与实际运行环境相关的深入研究,例如平台的结构强度、动密封可靠性、防腐防污等。
