
 >
>三江源典型区鼠洞无人机遥感识别研究
时间:
摘要:草原鼠洞的识别定位可以为鼠害的监测、预测和防治等提供科学参考,因此,如何快速且准确地识别草地鼠洞成为亟需解决的问题。选取玛多县典型区作为研究区,利用可见光波段无人机影像,研究并建立了面向对象的模板匹配法和支持向量机法的草地鼠洞自动识别方法。模板匹配法是在多尺度分割的影像中选取不同种类的鼠洞对象并生成匹配模板,接着进行目标检测并产生初始结果,最后构建光谱、几何和纹理特征库对检测结果进行筛选。支持向量机法首先采集鼠洞训练样本并优化分类特征空间,然后采用支持向量机分类器监督分类得到鼠洞识别结果。对2种方法的识别结果进行精度评价与分析表明:2种方法的总体精度均较高,适用于三江源区草原鼠洞的精准识别。基于面向对象的模板匹配法比支持向量机法的总体识别精度整体高1%,错分误差低3%,识别效果较好。
关键词:鼠洞;无人机;面向对象;模板匹配;支持向量机
0引言
三江源区是中国生态系统最为特殊和脆弱的地区之一[1],鼠害是该地区草地退化、生态恶化的主要原因。害鼠的挖掘和啃食活动破坏草地植被,造成大量水土流失,形成成片的次生裸地和寸草不生的“黑土滩”[2]。此外,害鼠大量啃食优良牧草,与家畜争食,加剧了畜草矛盾,降低了草地的载畜能力,也给畜牧业生产造成了极大的危害[3-5]。据调查,在鼠害最为猖獗时期,三江源地区鼠害面积达644.4万hm2,约占该地区内总可利用草地面积的29%。尽管目前已经成立了三江源自然保护区,并采取了多种防治措施针对鼠害问题进行综合治理,但仍有部分鼠害区未表现出草地恢复趋势[6]。在防治草原鼠害时,最大的问题是防治手段缺乏精准性和可持续性[7]。如果能够准确、快速地获取大范围草场内的鼠洞数量和分布,就可以采取更加具有针对性的防治措施,能够更加有效地治理鼠害。
遥感技术具有覆盖范围大、探测范围广的特点,其对于大范围内的鼠害监测具有一定的应用潜力。何咏琪等[8]研究了影响草原鼠害的主要因素,建立了草原鼠害监测模型,模拟结果与实地调查鼠害区域基本一致。徐正刚等[9]基于MODIS数据,提出运用增强型植被指数插值法获得研究区的田鼠危害图。黄建文[10]等利用2期TM影像,分析了梭梭林沙鼠鼠害防治前后的土壤调节植被指数的变化,实现鼠害动态监测。上述方法都是从整体趋势上来表现鼠害,对鼠洞的识别仍仅依靠人工采样调查法,虽然具有较高的准确性,但由于三江源地区地形特殊、气候恶劣,地域广大,开展传统人工调查极其困难。
近年来,随着无人机技术和计算机技术的高速发展,更多学者开始借助无人机影像结合人工智能、模式识别等新方法来实现大量数据的自动解译。VogtJT等利用基于模板的特征和基于目标的多光谱图像特征,构建火灾蚁穴自动检测的分类器[11]。SandinoJ等基于无人机影像和高光谱影像数据,采用支持向量机和数字图像处理技术批量检测白蚁丘[12]。本研究基于玛多县的无人机航拍数据,进行面向对象的模板匹配算法和支持向量机算法的高原鼠洞的自动识别研究,最终通过对比分析,得到合适的识别方法。
1研究区与数据
1.1研究区概况
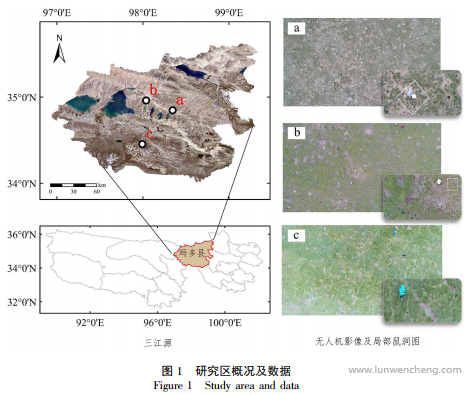
玛多县地处三江源自然保护区核心腹地(33°50'N~35°40'N,96°55'E~99°20'E),是保护区内草地鼠害发生严重的地区之一(图1)。县内天然草地总面积为229.9万hm2,其中可利用草原面积180.5万hm2。主要鼠害种类有高原鼠兔、高原田鼠等,分布在海拔4300m以下的滩地、丘陵地带以及地势平缓的坡地。据2012年调查统计,全县发生高原鼠兔危害面积128.8万hm2,严重危害面积220.62万hm2,占全县可利用草原面积的68.72%[13]。
1.2数据来源
以玛多县周边鼠害草原作为研究区,选取3幅高、中、低植被覆盖度的无人机影像a、b、c数据,拍摄时间为2017年8月,具体位置如图1所示。影像包括红、绿、蓝3个波段,拍摄高度为30m,大小为5472×3078像素,空间分辨率为0.74cm。
2研究方法
2.1面向对象结合模板匹配的鼠洞识别方法
面向对象的鼠洞提取流程分为预处理、影像分割、模板匹配、特征知识库构建和精度评价共5个部分。首先,将无人机影像分割成不同的对象单元,每个对象单元中包含了相同语义的像素集。其次,在影像中选取具有典型性的目标样本,通过eCognition9.0中模板匹配分类功能生成特定目标的检测模板,应用模板匹配算法初次标记出一些被认为的目标。再次,以目标对象的光谱、形状、纹理特征等形成知识库,建立规则,剔除非目标对象。最后,根据目视判读鼠洞结果对提取鼠洞的结果进行精度评价。
2.1.1影像预处理
由于无人机影像只有红绿蓝3个灰度特征,在影像分割时会存在将灰度差异小的不同地物像元合成一个对象,造成混分的现象。所以,需要对原始数据源进行图像增强处理,凸显目标。
研究目标为鼠洞,其在影像中特征比较明显,主要是以小面积的黑色区域为主。但部分鼠洞由于深度浅、形成时间短,也会呈现出深褐色至浅褐色,容易与裸土斑区域混分。为了减少同谱异物的现象出现,实验前对影像进行色彩空间转换,得到色度、亮度及饱和度3种色彩特征。为增大鼠洞与背景的灰度差、增加图像信息、提高影像分割精度,进一步对原始影像进行分段拉伸。
2.1.2影像分割
影像分割是面向对象信息提取中最关键的一步,直接影响后续分析处理的结果。最常用的方法是多尺度分割算法,它是一种自下而上(bottom-up)的方法,通过合并相邻的像素或小的分割对象,在保证对象与对象之间平均异质性最小、对象内部像元之间同质性最大的前提下,基于区域合并技术实现影像分割。该过程中重要的参数有3个:(1)尺度参数(Scaleparameter);(2)图像波段权重(Imagelayerweights);(3)同质性标准(Compositionofhomogeneitycriterion),其由2部分组成,即颜色(光谱)和形状,两者权重之和为1.0,而形状又由光滑度和紧致度来表示,两者权重之和也为1.0。图2ESP尺度分割分析Figure2ESPscalesegmentationanalysis
实验采用ESP(EstimationofScaleParameters)工具[14]确定影像的最佳分割尺度。以实验数据图1a为例,初始分割尺度参数设置为10,分割尺度步长为0.5,迭代次数为70,固定形状指数为0.2,紧致度指数为0.5,蓝、绿、红、色度、亮度、饱和度波段权重比(以下简称“波段权重比”)为1∶1∶1∶1∶2∶1,生成尺度与局部方差及方差变率的曲线图(图2)。
Scale-ROC曲线中以局部方差(LV)代表某块影像检查窗口中的影像对象异质性,以变化率(ROC)表示当前分割尺度与下一级分割尺度比值,ROC曲线中起伏最明显的波峰对应的尺度值就是比较好的分割尺度。从图2曲线可以初步确定影像1a的3个最佳分割尺度为18、27、37。当分割尺度为27时,能将目标鼠洞从裸土和植被中分割出来,并较大程度地保持洞口的完整性。然后对波段权重比和分割因子多次尝试,最终确定波段权重比为1∶1∶1∶1∶2∶1,形状因子为0.2,紧致度因子为0.5。影像1b、1c按照上述步骤得出“最优”分割参数(表1),影像分割后局部放大如图3所示。
2.1.3模板匹配
典型的模板匹配过程包含2个步骤,通过使用模版编辑(Templateeditor)进行模版生成,然后通过使用模版匹配算法(Templatematchingalgorithm)进行模版应用[15]。
首先,在原始无人机影像中使用合适的矩形框选出几类典型性的鼠洞样本,生成初始模板。其次,选择一小块有鼠洞的区域进行测试,匹配度显示为56%。再次,标记检测正确的鼠洞为样本,添加到第一次选择的样本中,生成新模板,选择不同试验区进行测试,重复进行上述步骤,使检测模板的匹配度达到80%。最后,使用最终的模板对分割影像进行鼠洞匹配,初步检测出鼠洞,如图4-Ⅰ所示。
2.1.4特征知识库构建
模板匹配过程中会产生误分的现象,将一些其他地物错误地识别为目标地物,导致提取精度不高。因此,需要对影像中目标的光谱、几何、纹理特征进行分析,构建特征知识库,建立提取规则,从而筛除模板匹配结果中的非鼠洞目标。
为了将检测结果中被误分为鼠洞的地物(如小土坑、小砾石等)筛除,通过分析影像中鼠洞对象特征,选取以下几个典型特征构建知识库:(1)亮度值Brightness:鼠洞以黑色或棕黑色为主,亮度值小于100,把深褐色的裸土和部分砾石筛除;(2)单个对象像素数量Area(pixels)大于32像元且小于258像元:把极小的裸土对象筛除;(3)最大光谱差异Max.Diff值小于0.075:把部分裸土和砾石筛除;(4)可见光3波段的改进型土壤调整植被指数V-MSAVI[15]小于-0.03:把草丛中深色簇状草剔除。执行以上3条规则后得出筛选结果。图4-Ⅱ中第一行是对模板匹配结果的局部放大图,图4-Ⅱ中第二行是最终结果图。两行图进行比较,可以看出:黄色圈中误判的鼠洞,在执行特征筛选后被剔除;构建目标特征知识库可以有效地剔除部分混分的鼠洞,提高自动识别率。
2.2面向对象结合SVM的鼠洞提取方法
面向对象结合SVM的鼠洞提取方法如下:首先,对影像预处理和影像分割,过程与上述方法中相同,得到将鼠洞口完整分割出来的影像。其次,选取分类的训练样本,评价样本质量。再次,选择图像光谱、纹理、几何特征作为分类的初始特征空间,通过特征优化找出最佳特征空间组合。最后,采用支持向量机分类器的监督分类方法提取鼠洞并进行精度评价。
2.2.1样本选择
数据使用航高30m的无人机影像,它可以清晰地分辨出地物信息,所以可直接通过目视解译来采集影像对象的训练样本,以确保各类样本具有代表性和空间分布上的均匀性。采用最优分割参数对影像a、b、c进行多尺度分割后,分别选取鼠洞的训练样本35个、裸地30个和草地30个。
2.2.2特征空间优化
面向对象分类方法从光谱特征、纹理特征、几何特征等多种角度挖掘地物的特性,特征种类的增多使得分类特征空间的维数不断增多,分类过程中容易出现特征冗余、分类精度下降等问题,因此在分类前需要进行特征空间优化。特征空间优化是为了快速高效地从高维的特征空间中选择一个最佳的低维特征空间。
根据鼠洞、裸地和植被在影像上的表征,构建了初始特征空间。光谱特征包括蓝、绿、红3个波段的均值(Mean)、标准差(Std),此外还包括最大差值(MaxDif)、比率(ratio)、亮度值(Brightness),共计11个特征;形状特征包括面积(Area)、周长(BL)、长宽比(LW)、形状指数(SI)、密度(Density)5个特征;纹理特征包括对比度(GLCMCon)、相关性(GLCMCor)、同质性(GLCMHom)、熵(GLCMEnt)、能量(GLCMAsm)、平均值(GLCMMean)6个特征;指数特征选择了可见光3波段的改进型土壤调整植被指数V-MSAVI[16]、可见光3波段差异植被指数VDVI[17]2个特征,所有特征共计24个。
推荐阅读:无人机遥感技术工程如何应用
摘要:管道在建设过程中造成的水土流失的监测,必须结合新型的无人机遥感技术进行监测,无人机遥感技术具备准确性、实时性和全面性的特点,成为生产建设项目水土保持监测新的技术手段,通过无人机对项目的重点区域进行遥感监测,对该技术应用于长输管道工程监测进行探讨。
由图5可以看出,随着特征维度增大,不同类间的分隔距离呈先增大后下降的趋势,中间有一个极点,即鼠洞识别的最优维度为11,其对应的最优空间特征有Mean_blue、Mean_green、Mean_red、MaxDif、Ratio_green、Brightness、Area、GLCMMean、GLCMHom、V-MSAVI、VDVI。从表2看出,鼠洞与植被的分离度最高,其次为鼠洞与裸地的分离度。
2.2.3支持向量机的影像分类
支持向量机是一种解决线性或非线性的广义分类器。
SVM的模型基本定义为:在样本特征向量空间上寻找最大间隔的线性分类器。这个线性分类器的基本分类思想就是寻找一个最优分离超平面作为分离训练数据的线性函数,来解决线性或非线性问题的分类[18]。
建立模型过程中采用的核函数类型为径向基神经网络核函数,通过交叉对比确定最佳模型参数:误差惩罚因子C=32,核参数γ=0.5,然后使影像中所有对象参与分类,得出鼠洞识别结果,如图6所示。
3结果与讨论
3.1鼠洞识别结果评价
基于无人机影像结合野外实地考察的经验,对研究区内鼠洞进行目视解译,利用目视解译结果对2种识别方法精度进行评估。为了定量比较二者的识别精度,把实验结果分为2类:鼠洞区与非鼠洞区,然后各类分别随机选取400个验证样本,最后建立混淆矩阵并分析鼠洞区识别过程中的各种误差,如表3和表4所示。
由表3和表4所示,基于面向对象的模板匹配鼠洞识别法的总体精度几乎达到90%以上,Kappa系数均高于0.79。而基于面向对象的支持向量机鼠洞识别法略低于前者,总体精度在89%左右,Kappa系数高于0.76。参考Kappa系数分类标准,二者鼠洞识别结果与目视解译结果具有高度的一致性[19-20]。2种方法的漏分误差值接近,这是由于部分鼠洞为倾斜进入或洞口上长了嵩草,识别时容易自动忽略。就错分误差而言,模板匹配法低于支持向量机法3%,可见前者能从鼠洞的不同整体形态考虑降低错分现象,后者容易出现把裸土中的深色土坑错分为鼠洞。整体上,2种方法在高度植被覆盖区识别鼠洞精度较好,在中低度植被覆盖区识别精度有所降低。
3.2精度分析与讨论
上述2种方法的识别精度能够达到80%,基本满足鼠洞识别的要求,为了能够进一步提高鼠洞识别精度,将从图像分割、识别过程2方面展开探讨。
由表3和表4可以看出,2种基于面向对象的鼠洞识别方法使用ESP确定的最佳尺度分割影像后进行识别,可以检测到80%鼠洞,但仍有20%目标会错分与漏分。统计错分对象与漏分对象结果得到:在模板匹配法进行鼠洞识别后,有5%漏分的鼠洞对象被欠分割和8%过度分割。错分对象中有4%存在欠分割的情况,而过度分割有3%。而支持向量机法的漏分对象中,有13%欠分割和3%过度分割。错分对象中欠分割和过度分割的分别为7%、9%。通过上述数据分析可知,采用ESP的最佳尺度来分割影像中的鼠洞会出现欠分割和过度分割的情况,影响最终识别精度。支持向量机法比模板匹配法对分割尺度的要求更高,后期可以尝试对鼠洞大小分级并使用不同的尺度来分割提取。
模板匹配法中3幅影像在模板匹配后检测到的鼠洞正确率均能够达到75%,接着选取典型特征构建知识库,利用规则进一步筛选,提高鼠洞识别精度。统计错分对象与漏分对象的Brightness、Area(pixels)、Max.Diff、V-MSAVI值发现:满足方法中4条规则的褐色小土坑和小砾石最容易被错分成鼠洞。漏分鼠洞中有35%由于不满足上述规则被筛除,其中有的鼠洞形态正常但过小,Area(pixels)不在正常鼠洞大小32像元和258像元之间;也有洞口倾斜导致Brightness不能低于100。如果仅将Area(pixels)和Brightness值域扩大,就会增加非鼠洞对象。提高此种方法的识别精度,可能需要完善模板匹配的算法并更加深度挖掘不同类型鼠洞特征。
