
 >
>姜燕团队在《电光与控制》发表基于预测误差法的无人机控制论文
时间:
南京航空航天大学自动化学院姜燕团队在《电光与控制》2025年第32卷第1期发表论文《基于预测误差法的无人机安全控制器设计》。该研究聚焦无人机飞行安全与作战完整性保障需求,通过非参数预测误差估计方法辨识无人机闭环控制系统执行机构模块,验证了辨识模型的无偏性,进而设计安全控制器并以俯仰通道为例完成仿真验证,结果表明控制器可将无人机飞行性能精准控制在安全范围,为飞行安全提供可靠保障。
随着无人机在军民领域的广泛应用,其飞行安全性与作战完整性愈发关键。现有研究多集中于无人机结构设计、故障预测等方面,针对飞行控制系统安全性的控制器设计存在空白,无人机常因速度、姿态超出安全界限引发飞行风险。姜燕团队瞄准这一技术痛点,构建了一套兼顾模型精度与安全约束的控制器设计方案。
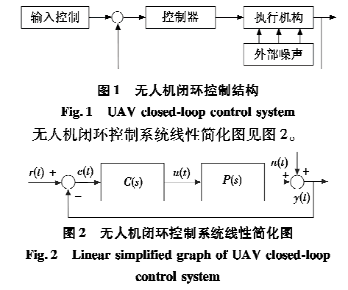
研究首先对无人机闭环控制系统进行拆解分析,明确输入控制量、输出响应参数及系统核心模块构成。考虑到工程中噪声、扰动等因素导致被控对象模型难以直接通过机理建模获得,团队创新采用非参数预测误差估计方法,通过收集输入信号、内部信号与输出响应数据,计算相关函数比值实现执行机构模块辨识。理论推导与验证表明,该方法获得的辨识模型与实际模型无偏,为后续控制器设计奠定了坚实基础。
在模型辨识基础上,团队明确了无人机安全性的核心内涵,即通过控制闭环输出,使飞行性能(速度、姿态角等)处于预设安全区间。基于此,将安全控制器设计转化为带约束的优化问题,引入拉格朗日乘子并应用KKT最优性条件,求解得到最优安全控制器表达式,实现了对输入指令的最优跟踪与安全边界的严格把控。
为验证控制器性能,团队以H380固定翼无人机俯仰通道为对象开展仿真实验,设定俯仰角速率安全范围为[-30, 30](°)/s。对比实验显示,相较于传统PID控制器,该安全控制器响应速度更快:小角度俯仰控制调整时间从4秒缩短至2秒,大角度输入时调整时间从10秒降至2.8秒,且无明显误差;同时,俯仰角速率变化始终处于安全区间内,回落速度优于传统控制器,充分证明了设计方案的有效性与优越性。
该研究提出的非参数辨识与安全控制一体化方法,为无人机飞行控制系统设计提供了新范式,尤其适用于复杂环境下的安全飞行需求,对提升无人机作战完整性与民用飞行可靠性具有重要工程价值。当前文件内容过长,豆包只阅读了前 96%。
