
 >
>小型高地隙植保喷药机研制
时间:
摘要:针对现有植保机械使用维护成本较高、驾驶员易出现农药中毒等问题,研制了一种遥控式小型高地隙植保喷药机。喷药机主要由具备四轮转向、四轮驱动的高地隙行走系统和精量喷药系统组成;高地隙底盘行走系统由底盘框架、驱动总成、转向总成组成,用以固定安装控制装置、蓄电池和精量喷药装置,前桥采用铰接式悬浮机构使底盘具备良好的行驶稳定性和田间通过性。精量喷药系统由精量控制器、测速模块、药箱、液泵、喷杆和喷头组成,能够根据作业行驶速度实时调节液泵流量,保证喷药量的均匀一致。测试结果表明:该高地隙植保喷药机能够在人工遥控模式下沿直线路径和田间道路自动行走,横向偏差小于20cm,行驶速度能够根据作业需要实时调节,喷杆喷幅为6.5m,喷药量调节范围为4.2~18L/min。
关键词:植保机械;精量喷药;高地隙;自动控制
0引言
随着精准农业和智慧农业等概念的提出,农业生产对农田作业机械的自动化和智能化水平提出了更高的要求[1-2]。其中,农田植保是防治病虫草害的有效措施。其作为作物生长期田间管理的重要环节,在作业速度、单位面积施药量、作业效率和作业安全性方面对植保机械设计研发有其特殊要求[3]。目前,我国普遍使用的传统植保机械均具备高地隙底盘和500L以上的药箱,在驾驶员的操作下能够完成田间施肥施药等作业任务,作业效率较高,能够满足一般的植保作业需求[4-6]。传统高地隙植保机械的整机质量较大,使用维护成本较高,田间行驶易造成农田土壤和作物的损坏,且存在均一化喷洒的问题,导致农药过量施用、生态环境恶化[7-9]。此外,传统植保机械需要有人现场操作,施药过程中易造成人员农药中毒。
为此,针对传统植保机械使用维护成本较高、均一化施药程度差及人员安全性低等诸多问题,采用电机控制与变量作业技术研制了具备四轮驱动、四轮转向和变量施药等功能的小型高地隙植保喷药机。
1系统组成
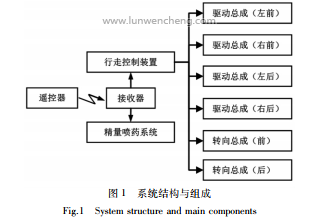
所研制的小型高地隙植保喷药机主要由高地隙行走系统和精量喷药系统组成,如图1所示。其中,高地隙行走系统包括行走控制装置、高地隙底盘、驱动总成和转向总成;精量喷药系统包括精量控制器、药箱、液泵、喷杆和喷头等。
遥控器由人工操作向小型高地隙植保机发出速度、转向、前进/后退、喷洒等控制信号;接收器由遥控信号接收机和处理单元组成,用以接收遥控器发出的控制信号,通过串口将控制指令输出至行走控制装置和精量控制器。高地隙行走系统和变量喷药系统均以蓄电池作为动力来源。
2高地隙行走系统结构设计
高地隙行走系统为植保喷药机提供行走驱动功能,主要由行走控制装置、高地隙底盘、4个驱动总成和2个转向总成组成,如图2所示。
4个驱动总成为机器提供行走驱动力,通过转向立柱与高地隙底盘联接;两个转向总成分别安装于前后桥横梁之上,用以实现4个车轮的同步转动。
2.1高地隙底盘设计
根据田间道路的路面宽度(3.5~4m)和主要大田作物的高度(小麦0~1200mm、大豆0~900mm、花生0~560mm、玉米苗期0~1500mm)[10-11],本文设计了植保喷药机高地隙底盘,其离地间隙1350mm、轴距2200mm、轮距1420mm。
后桥与底盘框架固定联接,前桥采用铰接式悬浮机构与底盘框架联接。此种联接方式保证了在崎岖不平的农田中行驶时4个驱动车轮能够同时与地面接触,从而使行走系统具备良好的行驶稳定性和田间通过性。
2.2驱动机构设计
小型高地隙植保喷药机由4个独立控制的驱动总成提供驱动力,主要包括无刷电机、行星减速器、锥齿传动总成和驱动轮,如图3所示。无刷电机的输出经行星减速器减速增扭后传递至花键轴的上端,花键轴的下端与锥齿传动总成的小锥齿轮联接,锥齿传动总成的大锥齿轮轴与驱动轮联接。无刷电机的额定功率P为0.5kW,额定转速N1为2800r/min,额定扭矩T1为1.7N·m;行星减速器速比I1为6,锥齿传动总成的速比I2为5.4。
2.3转向机构设计
转向机构主要包括转向电机及行星减速器、齿轮齿条式方向机、立柱总成、转向摇臂、角度传感器等,如图4所示。转向电机为步进电机,其输出轴与行星减速器的输入轴联接,行星减速器的输出轴通过联轴器与方向机的输入轴联接,方向机的两端通过球头拉杆与转向摇臂联接。
3行走控制系统设计
小型高地隙植保喷药机的行走控制系统主要包括驱动控制系统和转向控制系统两大部分,如图5所示。转向控制器由接收机和ArduinoDue开发板组成,将操作控制指令通过TTL串口发送至转向控制单元和速度控制单元。
3.1驱动控制系统
驱动控制系统为机器提供行走驱动力,用以实现机器的前进、后退、停止等基本功能,主要包括速度控制单元、无刷电机及其驱动器、速度传感器、角度传感器、驱动总成。车辆运动学模型如图6所示。
由车辆运动学理论与数学模型可知:机器在行驶和转向过程中需要保证每个车轮做纯滚动运动,以减少轮胎磨损、增强行驶稳定性。图6中,P为机器重心,PA、PB分别为前桥中心和后桥中心,O为运动瞬时旋转圆心,所有车轮需绕同一瞬时旋转圆心O做纯滚动转动。
3.2转向控制系统
转向控制系统的工作原理如图7所示。其主要包括转向控制单元、步进电机及驱动器、角度传感器、转向机构等。转向控制单元通过TTL串口接收转向角度指令φd,同时读取角度传感器的转向角测量值φa,计算并控制步进电机的旋转方向和旋转角度。本文所选步进电机自带的编码器为1000线,即步进电机输出轴旋转1周所需的脉冲数N为1000个。步进电机行星减速器的减速比I3为6,其输出轴角速度与转向立柱旋转角速度的比值为I4,则步进电机驱动器接收到的脉冲数s。
4精量喷药系统设计
精量喷药系统主要包括升降总成、喷杆总成和精量控制系统,如图8所示。升降总成采用平行四杆机构,由电动推杆提供提升力,用以调节喷杆喷头的高度,以适应不同高度的大田作物。喷杆总成由可折叠的三段式喷杆、喷头和水管组成,展开后喷杆总长度为6.2m,其上安装均匀分布12个扇形喷嘴,雾化角110°,喷幅为6.5m。三段喷杆由3个液泵分段供药,最大压力是0.64MPa,喷药量调节范围是4.2~18L/min。
精量控制系统主要包括精量控制器、GNSS测速模块、液泵调速器、液泵及压力传感器。精量控制器根据机器行驶速度、设定喷药量,实时读取各段喷杆的压力值,向液泵调速器发送控制信号以调节液泵转速,从而控制药液流量,以保证单位面积农药喷洒量的均匀一致。
5操控试验及性能分析
小型高地隙植保喷药机主要包括高地隙行走系统和精量喷药系统,如图9所示。其中,控制箱、液泵、药箱、蓄电池等固定安装于高地隙底盘之上。
为了测试小型高地隙植保喷药机的操作控制性能和行驶稳定性,对其进行了自动转向、直线行驶、转弯操控等一系列性能试验。试验测得车轮从正中分别转动到两侧的极限角度均为50°,即转向立柱旋转角度的最大范围φmax为100°。
1)试验时间:2018年9月21-23日。
2)试验地点:山东理工大学。.
3)试验对象:所开发的小型高地隙植保喷药机。
4)测量设备:RTK-GNSS高精度定位系统。
5.1直线行驶测试
.将GNSS接收机及其天线固定于小型高地隙植保机上,用以记录机器的行驶轨迹。试验过程中,由人工操作遥控器使机器沿直线行驶,如图10所示。机器从点A(588504.07,4073794.261)出发,完成地头转弯后沿直线路径1行驶90m,地头转弯后沿直线路径2行驶至点B(588507.42,4073792.964)。由行驶轨迹可知:小型高地隙植保喷药机沿路径1和路径2行驶过程中的最大横向偏差分别为16.4cm和19.6cm。这表明,其能够在人工操控下以较高的精度沿直线行驶,满足大田作物植保作业要求。
5.2综合性能测试
试验过程中,随机选择了一条近似矩形的田间道路,由人工操作遥控器使小型高地隙植保喷药机沿田间道路行驶,以验证其直线行驶、转弯性能和行驶稳定性。
用RTK-GNSS高精度定位系统记录其行驶轨迹,如图11所示。小型高地隙植保喷药机由点A(588507.42,4073792.96)出发,在点B、点C、点D处完成转弯,最后到达点E(588524.49,4073794.401)。
由RTK-GNSS定位系统所记录的行驶轨迹和测试过程可知:所研制的小型高地隙植保喷药机能够按照人工操作指令完成自动转向、自动调速、前进、后退、停止及喷药控制等基本功能。
相关知识推荐:农业科学杂志哪个比较好
6结论
1)研制了小型高地隙植保喷药机,在人工遥控下能够沿田间道路和作物行行走,同时完成植保喷药作业,消除了农药接触对作业人员的潜在危害。
2)所研制的小型高地隙植保喷药机,其底盘离地间隙1350mm,喷幅6.5m,喷药量调节范围4.2~18L/min,能够根据作业需求调节行驶速度,可应用于小麦、水稻、玉米及大豆等大多数大田作物的田间植保。
3)该机采用四轮驱动、四轮转向的行走控制方式,由驱动系统和转向系统相互配合完成直线行驶、地头转弯等基本操作,具备良好的行驶稳定性和田间通过性。
